«Собрать большой коптер ничего о них не зная?» — да ерунда / Dronk.Ru corporate blog / Habr
Думаю все заметили, что в интернете достаточно много статей про квадрики мелкого размера: тесты, обзоры и т. д. А вот тестов больших коптеров маловато. Думаю в основном потому, что большой коптер – это чаще всего индивидуальная постройка (не всегда, но часто). Поэтому я решил написать про свой личный «самосбор» – гексакоптер на раме tarotfy680. В качестве предыстории хочу рассказать о том как я собирал этот коптер с нулевыми знаниями. За три года он претерпел много модификаций: от мелких до полной смены «тяговой начинки».
Итак, все началось когда я решил заниматься аэросъемкой. На то время у меня был куплен небольшой «шальной» квадрокоптер, на котором я научился немного летать и, как я понял позже, вообще, не годится для съемки, т. к. грузоподъемности не хватало для необходимого оборудования. В итоге пришла идея собрать свой коптер. Русскому же человеку покупать готовый дорого, и амбиций что соберет «дешевле» достаточно. 🙂
В итоге с другом «поскребли по сусекам» и нашли немного денег на покупку деталей. Все заказывал с Китая, в основном Ebay и Hobbyking. Ссылки на первые сетапы уже не найду, давно это было. И через пару месяцев ожидания (тогда почта работала хуже чем сейчас) мне выдали все посылки. Огромная рама! Огромные винты! Аккумуляторы тяжелые! Прямо восторг был после мелкого квадрика. 🙂
Итак по характеристикам первого сетапа:
Ссылку на 2х осевой подвес к сожалению не найду, но помню, что он стоил по тем деньгам 6 т. р. и был на сервах)
Итак (помните что знания нулевые) собрал все это чудо. Причем я заменил алюминиевые трубы рамы на 500мм карбоновые трубы. Амбиции о «метровом» коптере меня не покидали…
Сейчас меня пайка контактов того времени ввела бы в ужас, но всё-таки. Коптер был собран. Сделан throttlerange регуляторов (процедура, которая как я понял выравнивает мин/макс значения скорости моторов для каждого регуля) и первый запуск. В тот раз я думал что вижу гексу последний раз. Причиной тому был GPS-компас назы, который был развернут на 180 градусов. Думаю коптероводы прикинут что это такое. 🙂
Ну да ладно. После доработок, дочиток инструкций и, все же, укорочения труб до нормальной длины — новый тест. Ура! Все полетело. «Ничего себе собрал его все таки» – думал я. Даже failsafe работает. В принципе на этом радостные моменты закончились и начались «неприятки». Наконец-то купил sonynex 5nв Москве. Поставил на подвес. Взлетел и… Снимаю! Снимаю! Эм, нет не снимаю…
Коптер почему-то «проседает». Летит, летит и потом берет и плюхается в траву. Не быстро… но ведь…так не должно быть! Поднимаю повыше – летает, летает….и опять теряет высоту…. Причем бывает так, что достаточно стремительно теряет высоту. В чем дело? Все настройил, все что мог прошерстил… не хочет летать и все. Как оказалось, уже через некоторое время, эти движки лучше летают на 4s аккумах чем на 3s… но на то время я этого не знал (инструкцию же в детстве читать не научили) и поэтому: интернет, форумы.
Хм. Прошивка регулей… Ага, надо попробовать что это такое… Прошивка SimonK, ага… говорят круто, стабильно — пробуем. Не буду описывать режим прошивки, т. к. это тот еще геморрой, когда нет подходящих коннекторов. Итог был потрясающим! Вау! Стабильно висит в воздухе! Держит высоту! Камеру таскает! Но итог был потрясающим – итог был недолгим. Проба первого Failsafe. Возврат домой — ну… вернулся… с дрейфом (gps, видимо, был немного повернут), но вернулся. Хорошо.
Потом еще и назу прошил! Ведь прошивка вышла… как ее обойти. Говорят же еще лучше будет. И одним прекрасным днем….поехали полетать в поле.
«Отлети подальше» – говорили они, «все будет ништяк» – убеждали они. В конечном счете краш. Причем такой… нормальный. Карбоновый подвес в щепки (хорошо что камеру снял). Пару лучей под замену и пару пропов тоже. Шок! Почему! Из-за чего! Грешил на назу. Откат назы до заводской прошивки не помог.
На failsafe он все падал и падал. Но без него вроде летал. Конечно же, хотелось и поснимать что-то. Даже умудрился снять первый «шоурил» так сказать. И в итоге в один прекрасный день мы встали рано утром (чтоб не было людей в городе почти) и пошли поснимать городской мост. Во время запуска пару раз «проскакивали моторы», т. е. дергались и не раскручивались. Но что уж нам… зря пришли что ли? Все таки запустили его в воздух и даже что-то поснимали. Когда аккумы уже сели и я собирался снижаться и уезжать домой, на высоте около 10 метров над набережной около моста, гексакоптер решил что хочет быть квадрокоптером и просто-напросто отрубил 2 движка. Элегантно наклонясь на 90 градусов он принял курс на землю, точнее, на асфальт. Представляете вот эту картину в замедленной съемке? Летит коптер в землю, а у тебя в голове счетчик такой тикает: -20$… -50$… – 100$…
И тут, откуда ни возьмись, из-под моста еще и люди выходят. У меня волосы на голове поседели, выпали, отрасли и снова поседели. Только чудом он упал метрах в двух от них. С того момента вопрос о безопасности полетов для меня на первом месте и над людьми, вообще, стараюсь не летать. Немного отойдя от увиденного я оценил масштаб урона.
Даже микро SD-флешка сломалась пополам. 🙂
Видео не осталось на память… Какие тут съемки, когда уверенности в коптере нет? И тут я наткнулся на статью, что якобы прошивка SimonK не работает с «многополюсными» двигателями (вроде так называется).
«Етижи пассатижи» — снова подумал я. Новое скрежетание по сусекам и покупка новых регуляторов. Купил регуляторы turnigy plush 30a*. Поставил. Ого! Летает… Что-то мне еще страшно летать… Но все таки оно работало в нормальном режиме, и даже failsafe, будь он неладен. К этому времени я перешел на 4s аккумы (как надо было сделать вначале). И в момент моего счастья один человек все испортил. Он сказал что такой сетап опасный. Он может упасть завтра, через месяц, через год. Типо эти регули с такими движками не подружаться. Какие проблемы, денег-то уйма… купил двигатели T-motor 2814-10 770kvу знакомого. Так как у него с такими же регулями и винтами коптер летал, но на более длинной раме.
Все собранно и настроено. Но вот незадача, раскачивает коптер и все тут. Гейнами зажать до конца не получается. К тому времени я собирал уже свой самодельный подвес на БК моторах. (О нем расскажу в другой статье). Повесил подвес. Вес стал больше и эффект смещения центра тяжести в них сработал. Коптер стал летать нормально. Единственным минусом были полеты в ветер. Тогда его все-таки раскачивало и я нервничал. Но летал он довольно неплохо и довольно долго. Было снято несколько проектов и т. д.
Быстросъемные пропеллеры — это вообще потрясающе. Очень устал от этих закручиваний и откручиваний гаечек, ведь транспортировать со снятыми пропеллерами куда удобнее.
Единственное пришлось слегка удлинить раму. Дело в том, что этот комплект подразумевает 13-ые винты взамен моих 12-ых. И со стоковыми мотормаунтами они бы друг друга цепляли. Но покупать новую раму было б сильно затратно, поэтому просто решил поставить мотормаунты современных версий этой рамы. Купил на «хоббикинге» (вот такие) мотормаунты, которые крепятся с торца трубы, тем самым удлиняя ее примерно на 7-9 см. В итоге зазор между пропеллерами стал примерно 1,5-2 см. Сейчас коптер таскает 3х осевой подвес + sonynex 5n. На самом деле с его грузоподъемностью он спокойно вытянет и зеркалку, так как рекомендуемая нагрузка на луч 800 грамм, а максимальная 2000 граммм, просто я не считаю, что мне это сейчас надо.
Вот такая получилась история о коптеростроении с нуля. Сказать что постройка вышла дешевле чем можно было купить коптер? Конечно нет. Однако, полученный опыт стоит этих денег и времени. Да и еще к вопросу о покупке аккумуляторов. Никогда не покупайте эти желтые zippycompact! Неважно 3s или 4s — это хлам. К сравнению гекса, с t-motor 2014-10 и подвесом на них, летала 5 минут. Реально всего 5 минут! На паре аккумов в сумме 10000mah. Если и выбирать из «дешевых» аккумов, то либо простые zippyлибо turnigy. Кроме того, существенную роль играет токоотдача. На 40с коптер пролетает от 4 до 6 минут дольше чем на 25с (личный опыт).
Вывод:
1) Собрать коптер с нулевыми знаниями можно, но будьте готовы потратить на это время и деньги. Короче говоря, сначала вы приобретете знания, а потом коптер.
2) Это будет дешевле? Скорее всего нет.
3) Вы сможете гордо говорить «я сам его собрал» (из комплектующих).
4) Возможно на вопрос «сколько стоит?» вы будете отвечать «даже не знаю».
5) Приобретенный опыт поможет вам починить свой коптер в открытом поле с помощью молотка и зубила.
6) При постройке коптера вы научитесь паять, много паять, хорошо паять и в совершенстве овладеете исконно русскими ругательными фразооборотами.
На этом все. В следующей статье я продолжу тему «русских амбиций» и расскажу про строительство 3-х осевого подвеса, который сейчас установлен на этом коптере. Всем спасибо за внимание. 🙂
Дополнительные фотоИ напоследок, итоговый список составляющих моего сегодняшнего коптера:
Итого: 706,56$ за гексокоптер способный таскать зеркалку. p.s. Спасибо Виктору за этот материал и опыт.
На этом всё, с вами был простой сервис для выбора сложной техники Dronk.Ru
Не забывайте подписываться на наш блог, будет ещё много интересного.
p.p.s. * — ссылки, отмеченные звёздочкой реферальные, так что вы можете дополнительно сэкономить, вернув кешбек до 4%. Подробнее на Dronk.ru/cashback/ или можете получить 6.5%, купив их через кешбек-сервис LetyShops.
Читайте также:
Живучие китайские смартфоны. Часть 1
Живучие китайские смартфоны. Часть 2
5 проекторов для дома
Китайские планшеты с Dual OS, для тех, кто не может сделать выбор
10 гаджетов для гиков с Gearbest со скидкой в честь дня рождения площадки
История Chuwi — от MP3-плееров в 2004 до планшетов на Windows 10 в 2016
Сравним цены на гаджеты предлагаемые GearBest на свой день рождения?
Квадрокоптер своими руками: Часть I / Habr
ВНИМАНИЕ, статья устарела, но её всё еще можно использовать в ознакомительных целяхКак и обещал, как только полечу — напишу полноценный пост по поводу сборки своего летающего агрегата. Наверняка многие давно посмотрели как «обычный» офисный сотрудник собирает это за 2 часа, сразу отмечу что я не «обычный» офисный работник, поэтому летчик из меня пока не очень, но важно что квадрокоптер летает и адекватно реагирует на управление. Первое и самое главное — если решили собирать, не экономьте и не думайте что вы умнее тех кто уже летает, так же учтите, что теория несколько расходится с практикой.
Есть большое число прошивок, готовых контроллеров, вариантов датчиков, моторов и т.д. и т.п. — выбрать есть из чего, но в статье остановлюсь только на одном варианте, основанном на Arduino Mega, прошивке MegaPirate и относительно дешевых датчиках.
Результат
Чтобы не мучить тебя, %username%, вот так оно летает без особых настроек, калибровок и балансировок в неумелых руках:
А теперь что же нам потребуется для этого…
Детали и цены
Самое важное и минимальное что потребуется для сборки с нуля (первым в списке идет то, что использовал я, затем то что используют многие другие):
| Сам квадрокоптер | ||
|---|---|---|
| Моторы: 4 штуки лучше брать на 1 больше, пригодится |
hacker Style Brushless Outrunner 20-22L 924kv | $12.88 |
| hexTronik DT700 Brushless Outrunner 700kv | $10.95 | |
| 2213N 800Kv Brushless Motor | $7.36 | |
| Пропеллеры: минимум 2 стандартных и 2 обратного вращения в начале попыток и испытаний это будет главных расходный материал, поэтому берите сразу много, заодно часть из них будет бракованное и не пригодное для использования |
10X6 Propellers (5шт) 10X6R Propellers (5шт) |
$2.40 $3.04 |
| APC 10×4.7 counter rotating propellers set | $8.50 | |
| Регуляторы скорости: 4 штуки покупать надо как и моторы с запасом, может быть брак или случайно сгорит и потом месяц ждать новый |
HobbyKing 30A BlueSeries Brushless Speed Controller они же Mystery 30A BlueSeries |
$10.47 $13.96 |
| TURNIGY Plush 25amp Speed Controller | $11.81 | |
| Источник питания с увеличением емкости растет и вес, а значит моторы будет больше потреблять, поэтому нет особого смысла брать супер емкий аккумулятор, лучше взять 2-3 мелких и менять их |
Turnigy 2200mAh 3S 30C Lipo | $13.79 |
| ZIPPY Flightmax 2800mAh 3S1P 30C | $17.76 | |
| Рама стараемся делать максимально легкой и прочной |
4 алюминиевые трубки или профиль 10х10 и кусок фанерки | разобрать алюминиевый штатив |
| HobbyKing Quadcopter Frame V1 | $14.99 | |
| Мозги и датчики | ||
| Программируемый микроконтроллер | Seeeduino Mega | $43.00 |
| Arduino Mega | $64.90 | |
| Датчики рекомендую сразу брать AllInOne или FFIMU платку, так как остальные датчики очень сильно пригодятся потом |
гироскоп ITG3205 акселерометр BMA020 |
WMP $7.98 BMA020 230руб |
| All In One (гироскоп ITG3200, акселерометр BMA180, барометр BMP085, магнитометр HMC5883L) | $99.80 | |
| FreeFlight IMU 1.22L | €84.00 | |
| Аппаратура управления и зарядное устройство | ||
| Аппаратура управления минимум 4 канала |
Hobby King 2.4Ghz 4Ch Tx & Rx V2 (Mode 2) | $22.99 |
| Turnigy 9X 9Ch (Mode 2) | $53.79 | |
| Аккумулятор к аппаратуре | Mystery 11.1V 2200mAh | $12.72 |
| AA 600mAH Ni-MH Battery Set (8pc) | $1.99 | |
| Зарядное устройство | iMAX B6 2.5″ LCD RC Lipo Battery Balance Charger | $36.50 |
| Turnigy Accucel-6 50W 6A Balancer/Charger | $22.99 | |
| Другое | ||
| так же потребуются проводочки, болтики, винтики, стяжки, дрель, паяльник с паяльными принадлежностями и более-менее прямые руки | ||
| ИТОГО примерно от 220$ | ||
Сборка и настройка железа
Предположим что всё что выше у вас уже есть и можно приступать к сверлению, паянию и скручиванию.
Раму делаем кто во что горазд, главное чтобы расстояние от центра до концов лучей было одинаково, пропеллеры при вращении не задевали друг друга и центральную часть (фанерку), так как на ней будут мозги, датчики и возможно камера. Датчики лучше устанавливать на толстый скотч, силикон или резину, для уменьшения вибрации. На концах или в середине лучей можно вставить резиновые мячики, пенопласт или плотный паралон в качестве шасси для мягкого приземления.
У меня получилось примерно вот так (аккумулятор крепится с другой стороны, на фото старый вариант мозгов коптера с прошивкой MultiWii, с которой мне так и не повезло):
не очень красиво, но летает
А теперь внимание косяки, о которые можно споткнутся по незнанию и нужная информация:
- Приемник надо спарить с передатчиком — написано в инструкции
- Регуляторы скорости (ESC) нужно калибровать! Для этого соединяем вместе все 4 ESC: землю (черный) и сигнальный провод(белый или желтый) и оставляем ОДИН провод питания (красный), после чего вставляем это в третий канал приемника, а так же соединяем провода питания и подсоединяем к регуляторам моторы. После этого на включенном передатчике ставим ручку газа (третий канал) в максимальное положение (вверх) и подключаем к регуляторам скорости источник питания, моторы весело пропищат, после чего опускаем ручку газа вниз и моторы снова пищат — ура, мы откалибровали регули
- Часто регуляторы скорости нужно еще и запрограммировать, об этом читайте инструкцию к своим регуляторам, основной момент — увеличить скорость реакции, повысив частоту и выставив режим моментальной реакции, а не постепенного набора оборотов. Это можно сделать как слушая бесконечные пищания, так и с помощью специальных карточек для программирования.
- Чтобы моторы вращались в другую сторону нужно поменять любые два провода местами
- Ставьте пропеллеры в последнюю очередь — они очень хорошо режут руки
- Моторы, как и пропеллеры часто требуют балансировки, для уменьшения вибрации, для этого возьмите обычные стяжки для кабелей и нацепив 1-2 на мотор вращайте и включайте, пока не почувствуете минимальную вибрацию. Более подробно, а так же с видео лучше почитать на специализированном форуме
Продолжение
PS: надеюсь люди в RC теме простят меня за неточности и поправят где надо.
Дрон своими руками: Урок 2. Рамы.

Содержание
Введение
И так, перед тем как приступить к сборке дрона, первым делом необходимо выбрать раму. Вы можете исполнить её самостоятельно, либо использовать уже готовые решения (UAV frame kit). Как вы уже смогли заметить, что для создания мультироторных БЛА можно использовать различные типы рам и конфигурации. Поэтому в этом разделе мы рассмотрим распространённые или основные типы рам, материалы исполнения, а также вопросы касающиеся проектирования.
Типы рам БПЛА
Трикоптер
- Описание: БПЛА, который имеет три луча, каждый из которых соединен с мотором. Передней частью трикоптера принято считать сторону стыка двух лучей (Y3). Угол между лучами может варьироваться, но, как правило он составляет 120°. Чтобы противодействовать гироскопическому эффекту неравномерного числа роторов, а также для изменения угла поворота, задний двигатель должен иметь возможность вращаться (достигается установкой обычного RC серводвигателя). Чтобы исключить из сборки применение сервопривода, используют конструкцию Y4, которая подразумевает соосную установку дополнительного мотора на заднем луче.
- Преимущества: Необычный внешний вид дрона. Лучших лётных характеристик достигает при полёте в прямом направлении. Цена (для сборки требуется меньшее количество моторов и регуляторов ESC).
- Недостатки: Асимметричная конструкция. Требует применение сервопривода. Сложность исполнения заднего луча (поскольку сервопривод должен быть установлен вдоль оси). Не все полётные контроллеры поддерживают такую конфигурацию.

Квадрокоптер
- Описание: «Квадрокоптер» дрон который имеет четыре луча, каждый из которых соединен с мотором. Для «X конфигурации» передней частью квадрокоптера принято считать сторону стыка двух лучей, для «+ конфигурации» передом может считаться продольный луч.
- Преимущества: Самый распространённый мультироторный дизайн. Простейшая и универсальная конструкция. В стандартной конфигурации лучи/моторы симметричны относительно двух осей. Все доступные на рынке контроллеры полёта могут работать с такой мультироторной сборкой.
- Недостатки: Отсутствие избыточности (если в системе происходит сбой, особенно в элементах силовой установки, беспилотник падает).

Гексакоптер
- Описание: «Гексакоптер» имеет шесть лучей, каждый из которых соединен с мотором. Передней частью гексакоптера принято считать сторону стыка двух лучей, но также передом может считаться и продольный луч.
- Преимущества: При необходимости, конструкция гексакоптера позволяет легко добавить два дополнительных луча и мотора, что позволит увеличить суммарную тягу, в следствии чего дрон сможет поднять больше полезной нагрузки. В случае отказа одного из моторов, допускается вероятность, что дрон сможет осуществить мягкую посадку, а не разбиться. Модульная конструкция рамы. Почти все полётные контроллеры поддерживают эту конфигурацию.
- Недостатки: Громоздкая и дорогостоящая конструкция. Дополнительные двигатели и детали увеличивают вес коптера, соответственно чтобы получить туже продолжительность полёта, что и у квадрокоптера, необходимо устанавливать более ёмкие АКБ.

Y6
- Описание: Конструкция Y6 представляет собой тип гексакоптера у которого в основе не шесть лучей, а три, каждый из которых соединён с парой соосно установленных моторов (итого 6 моторов). При этом стоит обратить внимание, что нижние пропеллеры проецируют тягу вниз.
- Преимущества: Меньшее количество компонентов по сравнению с гексакоптером. Поднимает больше полезной нагрузки по сравнению квадрокоптером. При использовании винтов с встречным вращением исключается гироскопический эффект, как у Y3. В случае отказа одного из моторов, допускается вероятность, что дрон сможет осуществить мягкую посадку, а не разбиться.
- Недостатки: Более дорогой по сравнению с квадрокоптером из-за использования дополнительных деталей, равноценных по стоимости деталям гексакоптера. Дополнительные моторы и детали увеличивают вес коптера, а значит, чтобы получить то же время полёта, что и у квадрокоптера, необходимо будет использовать АКБ большей ёмкости. Как показывает практика, тяга полученная на Y6, немного ниже чем у обычного гексакоптера, вероятно, потому, что нижний винт влияет на тягу верхнего винта. Не все полётные контроллеры поддерживают такую конфигурацию.

Октокоптер
- Описание: У октокоптера восемь лучей, каждый из которых соединен с мотором. Передней частью гексакоптера принято считать сторону стыка двух лучей.
- Преимущества: Больше моторов = больше тяги, и соответственно повышенная избыточность, позволяющая дрону уверенно перемещаться с тяжёлыми и дорогостоящими DSLR камерами.
- Недостатки: Больше моторов = более высокая цена и большой АКБ. Ввиду своей дороговизны актуален только для профессиональной сферы.

X8
- Описание: Конструкция X8 по-прежнему является октокоптером, только не с восемью, а с четырьмя лучами, каждый из которых соединён с парой соосно установленных моторов (итого 8 моторов).
- Преимущества: Больше двигателей = больше тяги, и соответственно повышенная избыточность. Больше шансов мягко посадить дрон в случае отказа мотора.
- Недостатки: Больше моторов = более высокая цена и большой АКБ. Ввиду своей дороговизны актуален только для профессиональной сферы деятельности.

Размер БПЛА
Беспилотники бывают разных размеров, от «Нано», которые меньше ладони, до крупногабаритных, которые можно перевозить только в кузове грузовика. Для большинства пользователей, которые только начинают познавать беспилотное хобби, оптимальный диапазон размеров, предлагающих наибольшую универсальность и ценность, находится в пределах от 350мм до 700мм. Размером рамы является диаметр наибольшего круга пересекающего каждый из моторов. Запчасти для БПЛА таких размеров имеют широкий спектр цен и самый большой выбор доступных продуктов.

Материалы исполнения БПЛА/Конструкция
Ниже приведены наиболее распространенные материалы исполнения используемые для изготовления рам мультироторных дронов, соответственно список не полный. В идеале рама должна быть жёсткой с минимально возможной передачей вибрации.
Поролон (Пена) — как единственный материал для изготовления рам БЛА используется редко, и, как правило, в комбинации с жёстким каркасом или усиленной конструкцией. Также может применяется в стратегических целях; в качестве защиты несущих винтов (пропеллеров), шасси, не редко выступает в качестве демпфера. Поролон может быть разных типов от мягкого до относительно жёсткого.

Дерево — если в приоритете дешевизна конструкции, то дерево — это отличный вариант, который значительно сократит время сборки и изготовления запасных частей. Древесина достаточно тверда и является проверенным временем материалом. Важно чтобы при изготовлении рамы использовалась идеально прямая древесина (без изгибов и деформации).

Пластик — для большинства пользователей доступен только в виде пластиковых листов. Имеет тенденцию к изгибу и как таковой не идеален. Отлично подходит для изготовления защитного каркаса или шасси. Если вы рассматриваете возможность 3D печати, следует учитывать временной интервал изготовления (возможно проще купить комплект дооснащения UAV frame kit). 3D печать деталей отлично себя зарекомендовала при создании небольших квадрокоптеров.

Алюминий — доходит до потребителя в различных формах и размерах. Вы можете использовать листовой алюминий для исполнения корпуса, либо экструдированный алюминий для реализации лучей дрона. Алюминий не такой лёгкий, по сравнению с углеродным волокном или G10, зато цена и долговечность выступают главными преимуществами материала. Вместо разрушения или трещин, алюминий имеет склонность к изгибу. Для работы с материалом требуется только пила и дрель.

G10 (разновидность стекловолокна) — не смотря на то, что внешний вид и основные свойства практически идентичны с карбоном (углеродным волокном), является менее дорогим материалом. В основном доступен в листовом формате и используется для реализации верхних и нижних пластин рамы. Также в отличии от углеродного волокна, G10 не блокирует радиочастотные волны.

PCB (Печатная плата – пластина из диэлектрика) — по сути аналог стекловолокна, но в отличии от последнего всегда плоские. Иногда используется в качестве верхних и нижних пластин рамы, с целью уменьшения количества используемых деталей (например, плата распределения питания часто встроена в нижнюю панель). Рамы нано/мини квадрокоптеров могут быть исполнены из одной печатной платы включающей в себя всю электронную начинку.

Углеродное волокно — самый востребованный материал из-за лёгкого веса и высокой прочности. Процесс изготовления по прежнему исключительно ручной. Как правило серийно производятся простые формы, такие как плоские листы, трубчатые комплектующие; исполнение сложных трехмерных форм осуществляется на заказ.

Дополнительные соображения
- Подвес — чаще всего используется для стабилизации камеры (FPV/Аэросъёмка). Как правило устанавливается под рамой в соответствии с центром тяжести БПЛА. Может крепиться напрямую к раме, либо посредством направляющих. Для стабилизации изображения рекомендуется использовать двух, либо трёх осевые подвесы. Требует увеличения длинны посадочных опор.

- Полезная нагрузка (транспортировочная) — в любительской сфере является чем-то вроде роскоши, так как любой дополнительный вес не только сокращает время полёта, но и приводит к отказу в использовании дополнительных элементов, которые могли бы добавить беспилотнику ключевых функций. При проектировании следует понимать, что транспортировочный кейс должен быть максимально лёгким и в тоже время прочным, а также сам груз должен жёстко крепиться, исключая любое перемещение в полёте.

- Посадочные опоры — несмотря на то, что некоторые БПЛА приземляются непосредственно на раму (как правило исключаются для снижения веса), применение в конструкции посадочных опор обеспечит зазор между нижней частью БПЛА и неровной поверхностью, а также в случае жёсткой посадки принимают удар на себя, увеличивая шансы на спасение таких важных элементов дрона как камера, подвес, АКБ и рама.

- Монтаж — несмотря на то, что проектировать и изготавливать беспилотник значительно проще, чем обычный вертолёт, расположение каждого элемента следует продумать в самом начале процесса проектирования.
Общие рекомендации по монтажу:
- При создании рамы с нуля, важно, обеспечить точное расположение четырёх монтажных отверстий посредством которых осуществляется крепёж моторов к раме.
- Большинство моторов для рам размером от 400 — 600мм имеют одинаковую схему монтажных отверстий, что позволяет использовать раму от одного производителя, а моторы от другого.
- Расположение всех дополнительных компонентов в идеале должно быть симметрично относительно одной оси, что в последствии поможет облегчить поиск и регулировку центра масс беспилотника.
- В идеале контроллер полёта должен быть расположен в центре круга (и как таковой в центре масс) соединяющего все моторы.
- Контроллер полёта обычно крепится к раме при помощи стоек, резиновых демпферов или двухстороннего скотча.
- Многие производители используют одинаковое расположение монтажных отверстий для контроллера полёта (например, квадрат 35мм либо 45мм), но как токового «промышленного стандарта» не существует.
- АКБ достаточно тяжелая, и если центр масс вашей сборки немного сдвинулся, вы можете отрегулировать его переместив слегка батарею.
- Убедитесь, что крепление АКБ немного «играет», но в тоже время обеспечивает надёжную фиксацию батареи.
- Ремни с липучей основой часто используются для фиксации АКБ, тем не менее не будет лишним добавить двухсторонний скотч между батареей и рамой.

Методические рекомендации
Шаг 1: Посмотрите, какие материалы и инструменты для их обработки имеются в вашем распоряжении.
- Если арсенала ваших возможностей не хватает для реализации кастомной рамы или вы просто хотите получить профессиональную раму, подумайте о приобретении UAV frame kit.
- Даже если рама исполнена с использованием необходимого инструмента и из основных материалов, она всё равно может иметь структурно слабые места вызывающие излишнюю вибрацию, либо смещение. Процесс изготовления требует острое зрение и опыт.
- Изготавливая раму самостоятельно, продумайте крепёж всех необходимых элементов дрона; моторы, электроника и т.д.
Шаг 2: Перечислите все дополнительные (вспомогательные) части, которые вы планируете включить в сборку.
- Это могут быть одно-, двух-, либо трех осевой подвес для камеры, парашют, бортовой мини компьютер, полезная нагрузка, дальнобойная электроника (как правило утяжеляет и увеличивает сборку), плавучие средства и т.д.
- Полученный список дополнительных/вспомогательных частей позволит получить представление о размерах беспилотника и рассчитать общую массу.
Шаг 3: Поразмышляйте о предполагаемых размерах рамы.
- Большая рама — необязательно большой потенциал дрона, и не факт, что рама меньших размеров сделает сборку дешевле.
- Дрон построенный на раме размером от 400 — 600мм рекомендуется для начинающих.
Шаг 4: Спроектируйте, соберите и протестируйте раму.
- Если вы приобрели комплект дооснащения (UAV frame kit), то вам не о чем беспокоится касательно прочности, жёсткости и сборки.
- Если вы решили спроектировать и изготовить раму с нуля, важно будет проверить её прочность, вес, и убедится, сможет ли конструкция противостоять вибрации (минимальным изгибом).
- Подумайте об использовании специализированного программного обеспечения для моделирования (многие из них бесплатны, например, Google Sketchup), чтобы спроектировать раму и убедиться в правильности выбранных размеров.
Теперь у вас есть рама и вы можете переходить к следующему уроку.
Сборка квадрокоптера своими руками

Если вы делаете свой первый квадрокоптер, и у вас нет 3D-принтера, тогда эта инструкция для вас. На пути к построению этого квадрокоптера мастер сделал семь моделей, и у каждой были свои, существенные недостатки. Наконец он смог, путем проб и ошибок, сделать эту, работающую модель.
Инструменты и материалы:
— Фанера толщиной 7 мм и размером примерно 30 x 22 см;
— Алюминиевая профильная труба 25*25 мм — 1 метр;
-Пропеллеры размером 1045;
— Приемник и контроллер;
-Motors и ESCs x 4;
-Изолента;
-Панель управления;
-Крепеж;
-Батарея Lipo;
-Зарядное устройство;
-Провода;
-Фиксатор резьбы;
-Паяльные принадлежности;
-Разъемы XT60;
Шаг первый: корпус
Напечатайте шаблон и приклейте его на фанеру. Вырежьте детали и просверлите все отверстия.
Установите аккумулятор на основание и отбалансируйте основание. Очертите аккумулятор. Приклейте планки с трех сторон аккумулятора.
Шаг второй: рама
Разрежьте алюминиевую профильную трубу на две равные части (по 50 см). Вырежьте по середине труб два паза по 2,5 см. Просверлите по центру отверстия. Соберите крестовину и закрепите болтом.


Теперь используйте крепление двигателя, которое поставляется с ними, чтобы разметит крепежные отверстия. Просверлите отверстия. Заусеницы нужно зашлифовать.
Разметьте и просверлите крепежные отверстия для крепления корпуса к раме.

Приклейте к корпусу боковые планки.


Шаг третий: монтаж
Теперь нужно закрепить моторы на раме. На крепежные винты обязательно нужно нанести фиксатор резьбы, в противном случае, винты выкрутятся и моторы улетят.
Подключите ESC к двигателям так, чтобы верхний левый двигатель вращался по часовой стрелке, верхний правый двигатель вращался против часовой стрелки, нижний правый двигатель вращался по часовой стрелке, а нижний левый двигатель вращался против часовой стрелки. Чтобы изменить направление вращения двигателей, поменяйте местами любые два из трех проводов. Заизолируйте соединения.
Протяните провода через рамку и протяните в отверстие, ESC закрепляется внутри трубок рамки.
Соедините все черные (минус) и все красные (плюс) провода вместе. Припаяйте два провода к разъему XT60 (красный и черный). Закрепите приемник к корпусу с помощью двустороннего скотча.
Протяните провода от контроллера и приемника через отверстия в крышке отсека, затем прикрутите крышку. Прикрутите контроллер к крышке. Подсоедините провода к плате управления полетом.
Шаг четвертый: настройка
Подключите батарею и контроллер должен загрузиться. На дисплее должно появиться сообщение об ошибке. Проигнорируйте его и нажмите кнопку меню. Прокрутите вниз и нажмите «сброс настроек». Затем должно появиться меню для выбора желаемой рамы дронов. Прокрутите вниз, пока не дойдете до режима Quadcopter- X и нажмите «принять». Нажмите назад и выберите «калибровка AUX». Поместите дрон на ровную поверхность и нажмите «калибровать». Когда это будет сделано, прокрутите вверх до настроек режима и измените автоматический уровень с «AUX» на «Always».
Отключите аккумулятор, включите контроллер, а затем снова подключите аккумулятор. Контроллер полета должен включиться и показывать SAFE. Переместить left в левый угол, и дисплей должен измениться с SAFE на ARMED,
Шаг пятый: пропеллеры
Закрепите винты на валы двигателя.


Все готово. И напоследок несколько советов от мастера.
По началу квадрокоптер может показаться сложным в управлении. Лучший способ начать полет — это подняться примерно на 1 метр над землей и полетать назад и вперед, влево и вправо, а затем начать полет квадрокоптера по кругу. Квадрокоптер не любит «рыскающий» полет, поэтому учитесь плавно управлять.
Начиная летать, держите заднюю часть дрона лицом к себе, чтобы вы всегда знали.
Винты из углеродного волокна прочнее пластиковых и не так ломаются.
Источник
 Доставка новых самоделок на почту
Доставка новых самоделок на почтуПолучайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.Как сделать Дрон своими руками

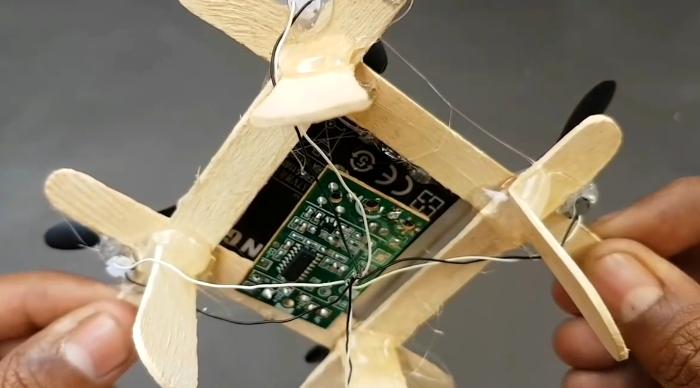
Мини дрон — квадрокоптер на дистанционном управлении можно очень просто сделать дома. Использовать его можно для игр и как макет для изучения работы дрона. Конструкция содержит минимальное количество деталей, а на постройку уйдет 15 минут времени или чуть более.
Наша простая модель не имеет ни регулировку скорости вращения двигателей, ни изменения направления полета. Она не умеет практически ничего, кроме того как подниматься в воздух вверх и опускаться по нажатию кнопки. Но если вы хотите, то вы можете в дальнейшем собрать более серьезный вариант и доработать всеми возможностями какими хотите.
Понадобится для сборки Дрона
А также: палочки от мороженного, пистолет с горячим клеем, паяльник с припоем и флюсом.
Подробнее о деталях для сборки квадрокоптера
Пульт с приемником для дистанционного управления можно позаимствовать из игрушки, к примеру из сломанной машинки или купить — Али Экспресс. Главным условием должно быть то, чтобы вся электроника исправно работала от напряжения 3,7 В.

Аккумуляторная батарея 3,7 В взята от старого мобильного телефона, ее так же можно приобрести — Али Экспресс. Там можно выбрать еще гораздо меньшие варианты.

Мини двигатели для летающих моделей можно купить — Али Экспресс.

Пропеллеры так же придется приобрести — Али Экспресс. Они должны подходить к двигателям. Так что лучше их взять вообще комплектом — тут на Али.

Изготовление Дрона — квадрокоптера
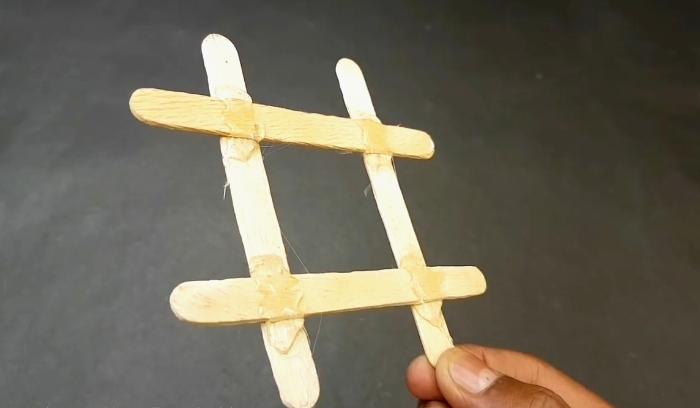
Итак, первым делом соберем такую решетку из четырех палочек для мороженного. Фиксируем все горячий клей. Это будет основная рама нашего мини квадрокоптера.
Аккумулятор приклеиваем таким же способом к раме.
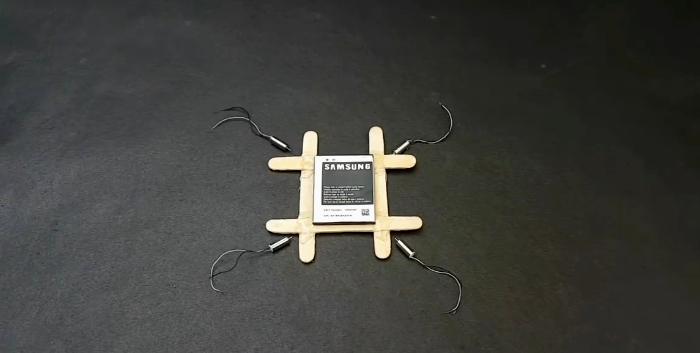
Приклеиваем четыре двигателя с пропеллерами в углы решетки.

Теперь нужно сделать ножки, на которых будет стоять дрон. Разрежем две палочки от мороженного пополам.

Прикрепим к основанию.
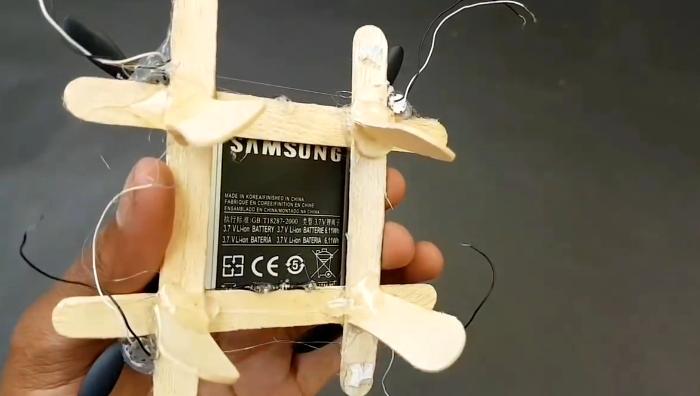
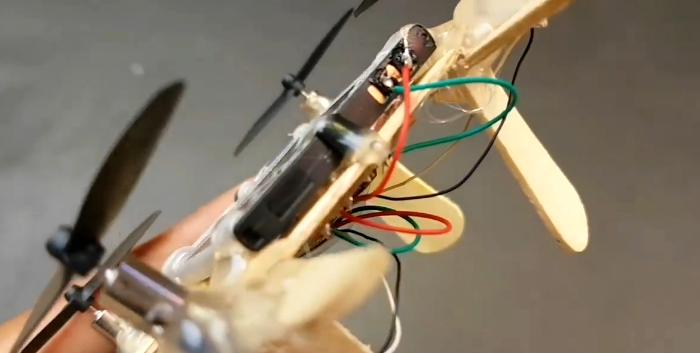
Добавляем приемную плату ДУ. Вывода всех двигателей соединим параллельно.
Подключаем провода двигателей к выходу платы ДУ.

Подключаемся к аккумуляторной батареи.
Проверка. Удерживаем дрон от подъема и нажимаем на кнопку пульта ДУ. Если пропеллеры всех четырех двигателей закрутились — все работает исправно.
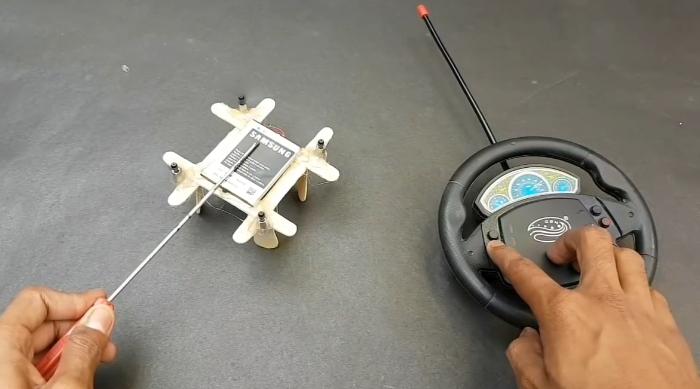
Выходим на открытую местность, ставим наш квадрокоптер и проверяем работу. Дрон должен взлететь в верх без особых проблем.

Если пропеллеры закрутились, а конструкция не взлетела, проверьте уровень заряда аккумулятора. Если все в норме, нужно облегчить конструкцию. В принципе, мощности таких четырех мотором должно хватить с запасом.
Во время постройки рекомендую как можно больше экономить общий вес, чтобы дрон был максимально легок. Так что лейте меньше клея, отрезайте максимально короткие провода и т.п.
Смотрите видео
Более подробную инструкцию по сборке игрушки смотрите в видео.
Как сделать квадрокоптер своими руками
Обычно у любого квадролетчика со временем скапливается куча разных старых моторов, электроники и прочего.
Современный квадрокоптер из этих деталей не собрать, но Old Style дрон может получится вполне интересным. Итак, давайте приступим!
Эта сборка самодельного квадрокоптера будет интересна не только тем, у кого завалялись старые детали, но и новичкам, которые могут купить электронику для дрона (список со ссылками смотрите в конце статьи) по весьма низкой цене и сделать летающий дрон своими руками.
Инструменты и материалы:
- Фанера толщиной 7 мм и размером примерно 30 x 22 см;
- Алюминиевая профильная труба 25*25 мм — 1 метр;
- Пропеллеры размером 1045;
- Приемник и контроллер;
- Моторы и ESCs x 4;
- Изолента;
- Полетный контроллер;
- Крепеж;
- Батарея Lipo;
- Зарядное устройство;
- Провода;
- Фиксатор резьбы;
- Паяльные принадлежности;
- Разъемы XT60;
Шаг первый: корпус
Напечатайте шаблон и приклейте его на фанеру. Вырежьте детали и просверлите все отверстия.
Установите аккумулятор на основание и отбалансируйте основание. Очертите аккумулятор. Приклейте планки с трех сторон аккумулятора.
Шаг второй: рама
Разрежьте алюминиевую профильную трубу на две равные части (по 50 см). Вырежьте по середине труб два паза по 2,5 см. Просверлите по центру отверстия. Соберите крестовину и закрепите болтом.
Теперь используйте крепление двигателя, которое поставляется с ними, чтобы разметит крепежные отверстия. Просверлите отверстия. Заусеницы нужно зашлифовать.
Разметьте и просверлите крепежные отверстия для крепления корпуса к раме.
Приклейте к корпусу боковые планки.
Шаг третий: монтаж
Теперь нужно закрепить моторы на раме. На крепежные винты обязательно нужно нанести фиксатор резьбы, в противном случае, винты выкрутятся и моторы улетят.
Подключите ESC к двигателям так, чтобы верхний левый двигатель вращался по часовой стрелке, верхний правый двигатель вращался против часовой стрелки, нижний правый двигатель вращался по часовой стрелке, а нижний левый двигатель вращался против часовой стрелки. Чтобы изменить направление вращения двигателей, поменяйте местами любые два из трех проводов. Заизолируйте соединения.
Протяните провода через рамку и протяните в отверстие, ESC закрепляется внутри трубок рамки.
Соедините все черные (минус) и все красные (плюс) провода вместе. Припаяйте два провода к разъему XT60 (красный и черный). Закрепите приемник к корпусу с помощью двустороннего скотча.
Протяните провода от контроллера и приемника через отверстия в крышке отсека, затем прикрутите крышку. Прикрутите контроллер к крышке. Подсоедините провода к плате управления полетом.
Шаг четвертый: настройка
Подключите батарею и контроллер должен загрузиться. На дисплее должно появиться сообщение об ошибке. Проигнорируйте его и нажмите кнопку меню.
Прокрутите вниз и нажмите «сброс настроек». Затем должно появиться меню для выбора желаемой рамы дронов. Прокрутите вниз, пока не дойдете до режима Quadcopter- X и нажмите «принять». Нажмите назад и выберите «калибровка AUX». Поместите дрон на ровную поверхность и нажмите «калибровать». Когда это будет сделано, прокрутите вверх до настроек режима и измените автоматический уровень с «AUX» на «Always».
Отключите аккумулятор, включите контроллер, а затем снова подключите аккумулятор. Контроллер полета должен включиться и показывать SAFE. Переместить left в левый угол, и дисплей должен измениться с SAFE на ARMED,
Шаг пятый: пропеллеры
Закрепите винты на валы двигателя.
Все готово. И напоследок несколько советов от мастера.
По началу квадрокоптер может показаться сложным в управлении. Лучший способ начать полет — это подняться примерно на 1 метр над землей и полетать назад и вперед, влево и вправо, а затем начать полет квадрокоптера по кругу. Квадрокоптер не любит «рыскающий» полет, поэтому учитесь плавно управлять.
Начиная летать, держите заднюю часть дрона лицом к себе, чтобы вы всегда знали.
Винты из углеродного волокна прочнее пластиковых и не так ломаются.
Удачных полетов!
Подборка электроники для самодельного квадрокоптера:
4PCS XXD A2212 1000KV
Купить: BangGood, AliExpress 4X XXD HW30A 30A
Купить: BangGood, AliExpress Gemfan 1045 Carbon Nylon
Купить: BangGood, AliExpress Gemfan 9047 Carbon Nylon
Купить: BangGood, AliExpress Gemfan 1045 Carbon Nylon
Купить: BangGood, AliExpress Betaflight / Openpilot CC3D
Купить: BangGood, AliExpress KK2.1.5 LCD Flight Control
Купить: BangGood, AliExpress ZOP Power 11.1V 2200MAH
Купить: BangGood, AliExpress XF Power 11.1V 2200mAh
Купить: BangGood, AliExpress XF POWER 11.1V 2200mAh
Купить: BangGood, AliExpress FlySky FS-i6 2.4G 6CH
Купить: BangGood, AliExpress IMaxRC IMax B3 Pro
Купить: BangGood, AliExpress New B3 20W Balance
Купить: BangGood, AliExpress ;
Похожие статьи:
Видеоподборки про RC моделизм → Как сделать мини Racer Quadcopter
Квадрокоптер своими руками → FPV-антенна своими руками
Видеоподборки про RC моделизм → Аппаратура радиоуправления своими руками / Проэкт RC Аппаратура
Видеоподборки про RC моделизм → Аппаратура радиоуправления из джойстика Defender cobra m5
Видеоподборки про RC моделизм → Дистанционный выключатель RC switch для моделей своими руками
Видеоподборки про RC моделизм → Самодельный FPV шлем. FPV на экране смартфона.
Постройка самодельного складного коптера
 Доброго времени суток уважаемые Муськовчане. Я недавно на Муське и это мой первый обзор здесь. Речь сегодня пойдет о постройке самодельного складного квадрокоптера для съемок. Итак кому интересно вэлком.
Доброго времени суток уважаемые Муськовчане. Я недавно на Муське и это мой первый обзор здесь. Речь сегодня пойдет о постройке самодельного складного квадрокоптера для съемок. Итак кому интересно вэлком. Сначала немного предыстории. Rc тематикой болен около 3х лет, и за это время собрал несколько самосборных коптеров. И вот захотелось сделать компактный дрон, что бы и в рюкзак помещался и в сумку мотоцикла, словом что бы можно было взять с собой куда угодно… ну почти, и обязательно самодельный.
Если вы решили всерьез заняться RC тематикой, то, скажем так, моделей у вас будет много разных, но вот три вещи, покупаются всерьез и надолго.
1. Зарядка для акумуляторов. Здесь я пожадничал, и купил неоригинал Imax B6 AC.
 . Хоть и неоригинал, но работает исправно уже четвертый год.
. Хоть и неоригинал, но работает исправно уже четвертый год. 2. Аппаратура радиоуправления. Я свою брал три года назад, на тот момент лучшую из бюджетных Radiolink AT9.
 . Сейчас она уже не выпускается, поэтому ссылку даю на более новую AT9S aliexpress.com/item/AT9S-2-4-9CH-R9DS-AT9/32841954226.html. С тех пор вышел нынешний бестселлер Taranis Qx7, но менять Radiolink на нее, для себя я не вижу смысла, а если приобретать с нуля первую аппаратуру, лучше взять Таранис.
. Сейчас она уже не выпускается, поэтому ссылку даю на более новую AT9S aliexpress.com/item/AT9S-2-4-9CH-R9DS-AT9/32841954226.html. С тех пор вышел нынешний бестселлер Taranis Qx7, но менять Radiolink на нее, для себя я не вижу смысла, а если приобретать с нуля первую аппаратуру, лучше взять Таранис. 3. FPV очки или шлем. Тут вопрос довольно индивидуальный, нужно мерить конкретный образец именно на Ваше лицо. Многим не подходит фокусное расстояние некоторых шлемов, многих не устраивает форма маски некоторых очков, а может и не подойти межзрачковое расстояние. Что до меня, я начинал летать в старых очках Fatshark, о них даже говорить не буду, ибо настолько убогие, что просто нет слов. Затем использовал шлем Eachine EV800.
 aliexpress.com/item/New-Arrival-Eachine-EV800-5-Inches-800×480-FPV-Video-Goggles-5-8G-40CH-Raceband-Auto-Searching/32666906411.html. Вот в нем уже очень неплохое изображение и широкий диапазон каналов приемника. Сейчас летаю в купленых на барахолке, очках Aomway Commander V1
aliexpress.com/item/New-Arrival-Eachine-EV800-5-Inches-800×480-FPV-Video-Goggles-5-8G-40CH-Raceband-Auto-Searching/32666906411.html. Вот в нем уже очень неплохое изображение и широкий диапазон каналов приемника. Сейчас летаю в купленых на барахолке, очках Aomway Commander V1  . Очки хороши, даже очень, но приобретать их за полную стоимость меня жаба душила, так что искал б.у.
. Очки хороши, даже очень, но приобретать их за полную стоимость меня жаба душила, так что искал б.у. А сейчас давайте перейдем непосредственно к самому коптеру, начнем пожалуй с рамы. Рама это одна из немногих вещей, купленых не в Китае, так что особо останавливаться на ней не буду. Скажу только, что рама конструкции Андрея Грушина. С учетом использования современных комплектующих, укоротил ее на 75мм. forum.rcdesign.ru/blogs/121800/blog20789.html Она сделана из текстолита и алюминиевого профиля 10мм.
 Акумулятор я использовал Onbo 4S 4200 mAh 35c.
Акумулятор я использовал Onbo 4S 4200 mAh 35c.  Идем дальше, мозгом нашего коптера будет контролер Matek F405CTR
Идем дальше, мозгом нашего коптера будет контролер Matek F405CTR  aliexpress.com/item/matek-BetaFlight-F405-CTR-F405-CTR-PDB/32856776468.html»>, не самый удачный контролер для большой рамы из-за того, что сравнительно большие пропеллеры вызывают больше низкочастотных вибраций, чем пропеллеры гоночных коптеров(для коих он и предназначен), а хорошо организовать виброразвязку этого контролера трудно потому что он совмещен с платой разводки питания, а к ней тянутся достаточно толстые силовые провода. Далее, выбираем моторы. Двигатели серии 2216 отмел, как довольно тяжелые, в то же время, требовалась достаточная мощность, что бы таскать камеру с подвесом. Выбрал моторы Gartt 2312.
aliexpress.com/item/matek-BetaFlight-F405-CTR-F405-CTR-PDB/32856776468.html»>, не самый удачный контролер для большой рамы из-за того, что сравнительно большие пропеллеры вызывают больше низкочастотных вибраций, чем пропеллеры гоночных коптеров(для коих он и предназначен), а хорошо организовать виброразвязку этого контролера трудно потому что он совмещен с платой разводки питания, а к ней тянутся достаточно толстые силовые провода. Далее, выбираем моторы. Двигатели серии 2216 отмел, как довольно тяжелые, в то же время, требовалась достаточная мощность, что бы таскать камеру с подвесом. Выбрал моторы Gartt 2312.  Почему то найти на Алиэкспрессе я их сейчас не смог (а я только там и закупаюсь), так что ссыль дать не могу. Идем дальше, регулятор я использовал Racerstar 4 в 1 на 30а
Почему то найти на Алиэкспрессе я их сейчас не смог (а я только там и закупаюсь), так что ссыль дать не могу. Идем дальше, регулятор я использовал Racerstar 4 в 1 на 30а  aliexpress.com/item/2017-New-Arrival-Racerstar-Shot30A-ESC-30A-30amp-3-6S-4-in-1-BLHeli-S-BB2/32806268101.html. Подвес сначала хотел использовать пластиковую, немного тюнингованную, Walkera G-2D
aliexpress.com/item/2017-New-Arrival-Racerstar-Shot30A-ESC-30A-30amp-3-6S-4-in-1-BLHeli-S-BB2/32806268101.html. Подвес сначала хотел использовать пластиковую, немного тюнингованную, Walkera G-2D  , но впоследствии от нее пришлось отказаться, (как и от регулятора 4 в 1). Почему, об этом чуть позже. Сейчас на коптер установлен подвес Tarot t-3D
, но впоследствии от нее пришлось отказаться, (как и от регулятора 4 в 1). Почему, об этом чуть позже. Сейчас на коптер установлен подвес Tarot t-3D  Брал тут, только он сильно подорожал aliexpress.com/item/Tarot-TL3T01-3Aixs-Brushless-Gimbal-for-DIY-RC-Drone-with-camera-Gopro-HERO3-HERO4-Sport-Camera/32642968051.html. Подвес по всем критериям очень средненький, но довольно легкий и компактный. Камера из разряда «дешево и сердито», народная Xiaomi Yi
Брал тут, только он сильно подорожал aliexpress.com/item/Tarot-TL3T01-3Aixs-Brushless-Gimbal-for-DIY-RC-Drone-with-camera-Gopro-HERO3-HERO4-Sport-Camera/32642968051.html. Подвес по всем критериям очень средненький, но довольно легкий и компактный. Камера из разряда «дешево и сердито», народная Xiaomi Yi  Брал тут aliexpress.com/item/YI-1080P-Action-Camera-Lime-Green-High-definition-16-0MP-155-Degree-Angle-3D-Noise-Reduction/32826768360.html. Для своей цены она снимает просто великолепно, а есть еще возможность использовать скрипты для улучшения качества видео, но в планах перейти конечно на Xiaomi Yi 4k. Для передачи видеосигнала с камеры в полетный контролер (там ведь встроенное ОСД (Осд, это микросхема, которая накладывает различные параметры полета (высота, скорость и.т.д.) прямо на изображение)), взял вот такой шнурок
Брал тут aliexpress.com/item/YI-1080P-Action-Camera-Lime-Green-High-definition-16-0MP-155-Degree-Angle-3D-Noise-Reduction/32826768360.html. Для своей цены она снимает просто великолепно, а есть еще возможность использовать скрипты для улучшения качества видео, но в планах перейти конечно на Xiaomi Yi 4k. Для передачи видеосигнала с камеры в полетный контролер (там ведь встроенное ОСД (Осд, это микросхема, которая накладывает различные параметры полета (высота, скорость и.т.д.) прямо на изображение)), взял вот такой шнурок  Вот ссылка… aliexpress.com/item/FPV-AV-Video-Output-Transmission-Cable-Line-Image-Data-Rechargeable-Cable-For-XiaoMi-Yi-Sport-Action/32789312005.html.
Вот ссылка… aliexpress.com/item/FPV-AV-Video-Output-Transmission-Cable-Line-Image-Data-Rechargeable-Cable-For-XiaoMi-Yi-Sport-Action/32789312005.html.Продолжаем. Видеопередатчик, для онлайн передачи видеосигнала на землю, временно поставил самый дешевый Boscam Ts5828 мощностью 600 мВт.
 Брал тут aliexpress.com/item/2015-New-FPV-5-8GHz-600mW-32-Channels-Mini-Wireless-A-V-Transmitting-TX-Module-TS5828/32299796347.html. Не знаю, честные там милливаты или нет, но показал он себя довольно не плохо, на 3 км связь прекрасная. Дальше пока не летал. Антенку к нему я взял фирмы Aomway, вот такую
Брал тут aliexpress.com/item/2015-New-FPV-5-8GHz-600mW-32-Channels-Mini-Wireless-A-V-Transmitting-TX-Module-TS5828/32299796347.html. Не знаю, честные там милливаты или нет, но показал он себя довольно не плохо, на 3 км связь прекрасная. Дальше пока не летал. Антенку к нему я взял фирмы Aomway, вот такую  Брал их тоже на Али aliexpress.com/item/1pcs-5-8G-3dBi-4-Leaf-Clover-AV-Transmission-RHCP-TX-RX-Set-SMA-RP-SMA/32650636196.html Приемник для этого коптера я выбрал R12dsm
Брал их тоже на Али aliexpress.com/item/1pcs-5-8G-3dBi-4-Leaf-Clover-AV-Transmission-RHCP-TX-RX-Set-SMA-RP-SMA/32650636196.html Приемник для этого коптера я выбрал R12dsm 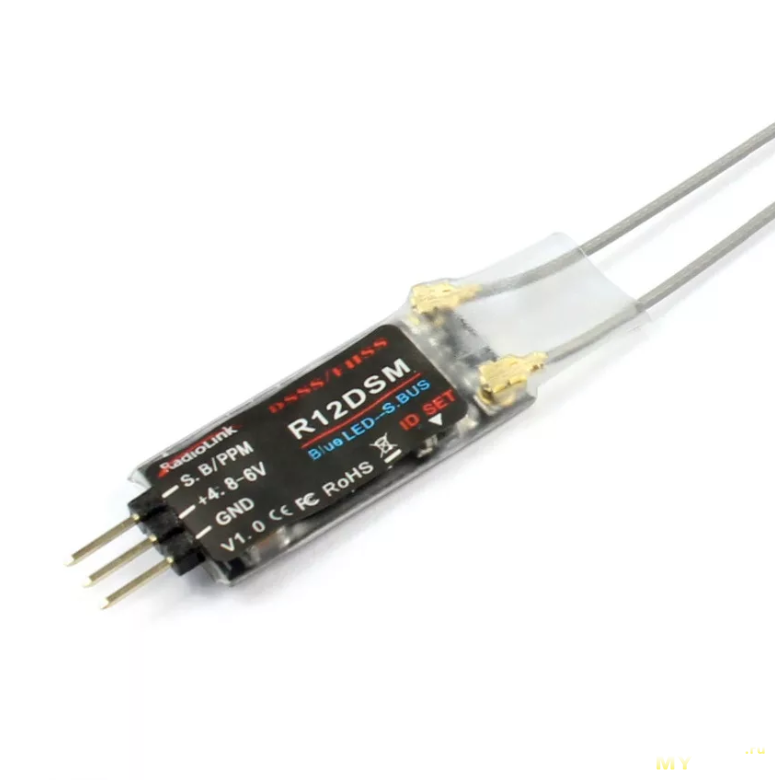 , предварительно заменив на нем антены, на более качественные. Приемник GPS у меня Radiolink Ts100
, предварительно заменив на нем антены, на более качественные. Приемник GPS у меня Radiolink Ts100 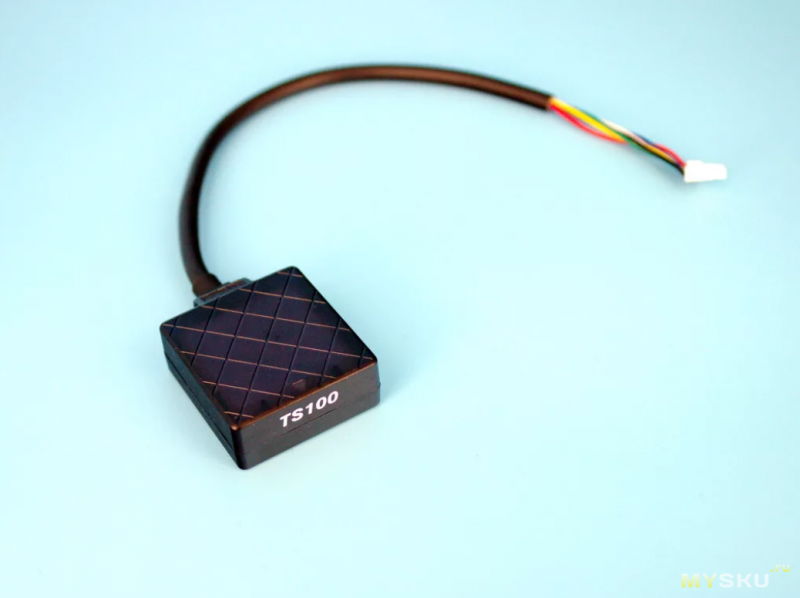 Брал тут aliexpress.com/item/TS100-M8N-gps-UBX-M8030/32845080601.html. Этот модуль очень маленький, легкий, имеет на плате компас. Ловит как GPS, так и ГлоНасс. В хорошую погоду ловит до 23 спутника, и делает это очень быстро. К нему нам понадобится стойка крепления. Нужна она для того, что бы максимально отдалить компас от наводок, вызванных большими токами в силовых цепях дрона. Я взял самую простую
Брал тут aliexpress.com/item/TS100-M8N-gps-UBX-M8030/32845080601.html. Этот модуль очень маленький, легкий, имеет на плате компас. Ловит как GPS, так и ГлоНасс. В хорошую погоду ловит до 23 спутника, и делает это очень быстро. К нему нам понадобится стойка крепления. Нужна она для того, что бы максимально отдалить компас от наводок, вызванных большими токами в силовых цепях дрона. Я взял самую простую  вот ссылочка на нее… aliexpress.com/item/7/32853297266.html. Ну и в заключении, пропеллеры. Я перепробовал достаточное количество размеров и материалов пропеллеров и конкретно на этом коптере лучше всех себя показали карбоновые пропеллеры размера 9047. Диаметр у них 9 дюймов при шаге 47.
вот ссылочка на нее… aliexpress.com/item/7/32853297266.html. Ну и в заключении, пропеллеры. Я перепробовал достаточное количество размеров и материалов пропеллеров и конкретно на этом коптере лучше всех себя показали карбоновые пропеллеры размера 9047. Диаметр у них 9 дюймов при шаге 47.  . Вот тут брал… aliexpress.com/item/F05309-9×4-7-3K-Carbon-Fiber-Propeller-CW-CCW-9047-CF-Props-Blade-For-RC-Quadcopter/964675104.html
. Вот тут брал… aliexpress.com/item/F05309-9×4-7-3K-Carbon-Fiber-Propeller-CW-CCW-9047-CF-Props-Blade-For-RC-Quadcopter/964675104.htmlНу что, с комплектацией вроде все, если что забыл, ткните носом. Приступаем к сборке. Заранее приношу извинения за качество фото и их малое количество. Слишком был увлечен процессом. Итак поехали!
Первым делом отрезаем кусочки 10мм профиля на нужную длину (какие хотим в итоги лучи) и сверлим отверстия для крепления моторов, прокладки проводов и антен приемника радиоуправления. Получается как то так…. , крепим моторы к внутренней стороне профиля. Штатные винты придется немного укоротить, профиль намного тоньше, чем лучи любой готовой рамы, на которые расчитаны эти винты. Если этого не сделать, винт упрется в обмотку двигателя и скорее всего он преждевременно скончается. В конечном итоге получается как то так…
, крепим моторы к внутренней стороне профиля. Штатные винты придется немного укоротить, профиль намного тоньше, чем лучи любой готовой рамы, на которые расчитаны эти винты. Если этого не сделать, винт упрется в обмотку двигателя и скорее всего он преждевременно скончается. В конечном итоге получается как то так… . На этом фото видны и антены радиоуправления. Провода от моторов протягиваем через проделанные отверстия внутрь луча. Я еще дополнительно их защитил оплеткой «змеиная кожа». Вот как то так….
. На этом фото видны и антены радиоуправления. Провода от моторов протягиваем через проделанные отверстия внутрь луча. Я еще дополнительно их защитил оплеткой «змеиная кожа». Вот как то так…. . Далее, красим детали рамы в понравившийся цвет, крепим готовые лучи, регулятор оборотов и припаиваем моторы к его выводам ….
. Далее, красим детали рамы в понравившийся цвет, крепим готовые лучи, регулятор оборотов и припаиваем моторы к его выводам ….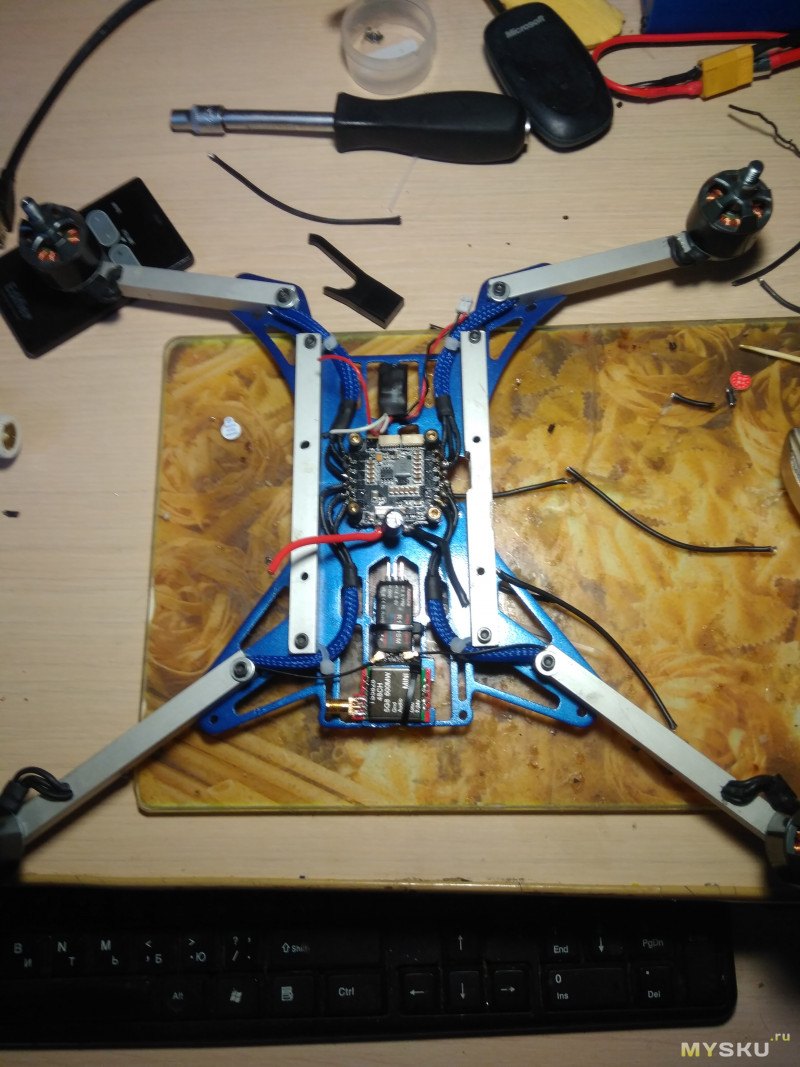 Тут же на фото видно установку приемника радиоуправления, видеопередатчика и понижающего стабилизатора для питания подвеса. Стабилизатор нужен для того что бы вне зависимости от напряжения силового акумулятора (14.0-16.8в), подвес питался всегда от 12в. Далее устанавливаем полетный контролер, желательно на демпферы. Я взял вот такие (за что и поплатился)
Тут же на фото видно установку приемника радиоуправления, видеопередатчика и понижающего стабилизатора для питания подвеса. Стабилизатор нужен для того что бы вне зависимости от напряжения силового акумулятора (14.0-16.8в), подвес питался всегда от 12в. Далее устанавливаем полетный контролер, желательно на демпферы. Я взял вот такие (за что и поплатился)  , но об этом чуть позже… К полетному контролеру припаиваю приемник радиоуправления, FPV кабель от камеры и кабель к видеопередатчика, а так же силовой разъем от акумулятора (его я решил вывести на проводах подальше от ПК) …
, но об этом чуть позже… К полетному контролеру припаиваю приемник радиоуправления, FPV кабель от камеры и кабель к видеопередатчика, а так же силовой разъем от акумулятора (его я решил вывести на проводах подальше от ПК) …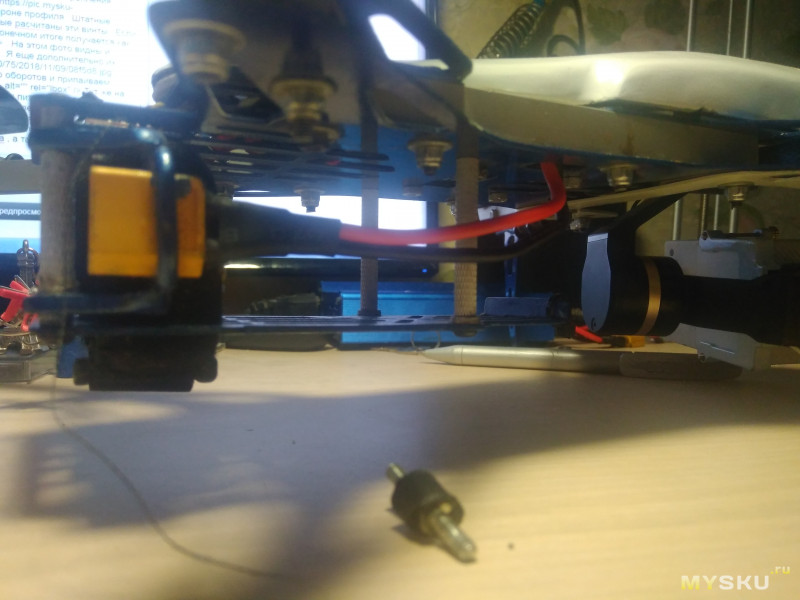
 … как то так. Припаиваем также разъем для подключения GPS приемника и компаса. Также нужно припаять два силовых провода для питания регулятора оборотов и шлейф управления регулятором. Все припаяно по схеме, взятой с официального сайта производителя ПК. Вот она….
… как то так. Припаиваем также разъем для подключения GPS приемника и компаса. Также нужно припаять два силовых провода для питания регулятора оборотов и шлейф управления регулятором. Все припаяно по схеме, взятой с официального сайта производителя ПК. Вот она….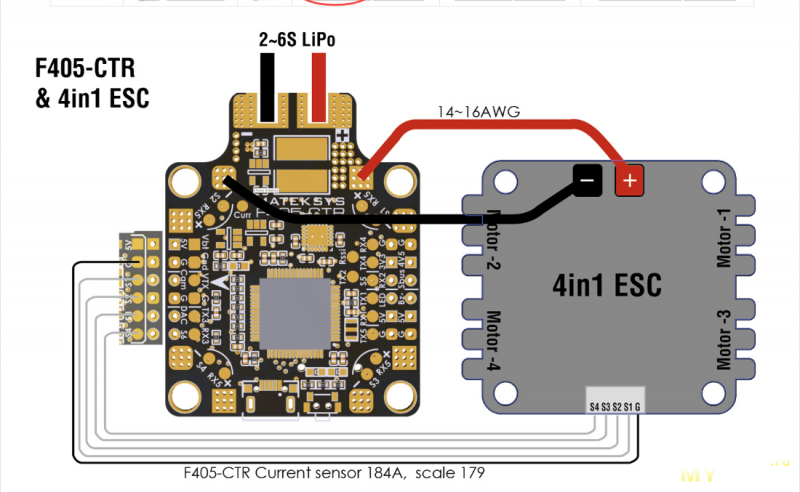 по этой схеме подключается регулятор, а вот по этой все остальное….
по этой схеме подключается регулятор, а вот по этой все остальное….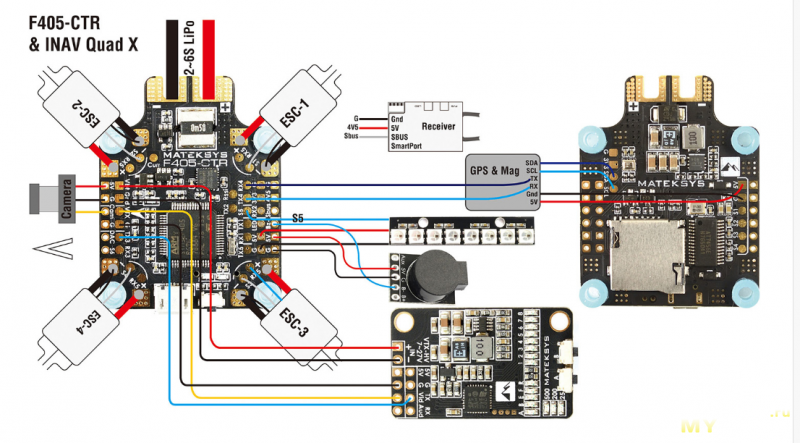 . Здесь не обращаем внимание на раздельные регуляторы. Получается примерно вот так….
. Здесь не обращаем внимание на раздельные регуляторы. Получается примерно вот так….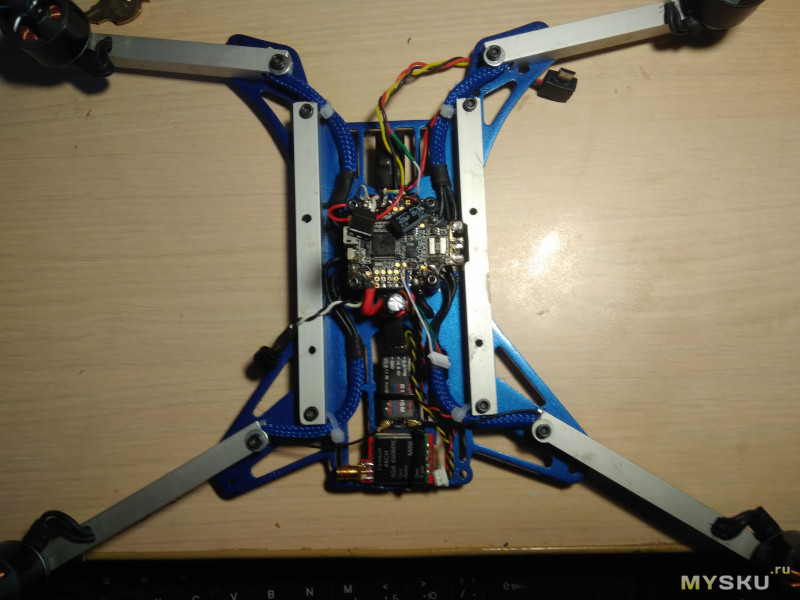 . На фото так же виден конденсатор, который припаивается параллельно силовому разъему и призван сглаживать скачки напряжения в силовой цепи. Конденсатор идет в комплекте с ПК. Так же виден конектор для управления наклоном камеры, он припаивается к выводу S6 полетного контролера и к земле. Собственно можно собирать раму до конца, ставить массогабаритный макет камеры с подвесом ( что бы не убить нежную технику в случае незапланированного краша ), сделать начальные настройки и идти в поле настраивать более точно. На квадрике установлена прошивка Inav 1.9.1. Как прошивать полетный контролер и настраивать Inav я здесь не буду описывать. Это довольно обширная тема, во первых, требующая отдельного обзора, во вторых уже полно видео и рекомендации от более опытных людей с более понятным объяснением. Но если кому нужно, могу объяснить на пальцах. А мы продолжаем… На этом фото первый полет и зависание в точке. Видео висения и пример съемки коптера будет в конце обзора…
. На фото так же виден конденсатор, который припаивается параллельно силовому разъему и призван сглаживать скачки напряжения в силовой цепи. Конденсатор идет в комплекте с ПК. Так же виден конектор для управления наклоном камеры, он припаивается к выводу S6 полетного контролера и к земле. Собственно можно собирать раму до конца, ставить массогабаритный макет камеры с подвесом ( что бы не убить нежную технику в случае незапланированного краша ), сделать начальные настройки и идти в поле настраивать более точно. На квадрике установлена прошивка Inav 1.9.1. Как прошивать полетный контролер и настраивать Inav я здесь не буду описывать. Это довольно обширная тема, во первых, требующая отдельного обзора, во вторых уже полно видео и рекомендации от более опытных людей с более понятным объяснением. Но если кому нужно, могу объяснить на пальцах. А мы продолжаем… На этом фото первый полет и зависание в точке. Видео висения и пример съемки коптера будет в конце обзора… . Теперь пришло время остановиться подробнее на демпферах, которые я использовал для полетного контролера. Дело в том, что они немного широки и не встают нормально на регулятор. Я немного их сточил с одной стороны (на фото видно, если присмотреться ), при этом оголилась внутренняя металлическая часть. Она то и замкнула один из выводов регулятора. Пришлось его заменить раздельными Racerstar Lite 30a
. Теперь пришло время остановиться подробнее на демпферах, которые я использовал для полетного контролера. Дело в том, что они немного широки и не встают нормально на регулятор. Я немного их сточил с одной стороны (на фото видно, если присмотреться ), при этом оголилась внутренняя металлическая часть. Она то и замкнула один из выводов регулятора. Пришлось его заменить раздельными Racerstar Lite 30a  По традиции ссылка вот
По традиции ссылка вот
aliexpress.com/item/Best-Deal-4PCS-Racerstar-RS30A-Lite-30A-Blheli-S-BB1-2-4S-Brushless-ESC-For-FPV/32761032518.html… и платой распределения питания от Матек 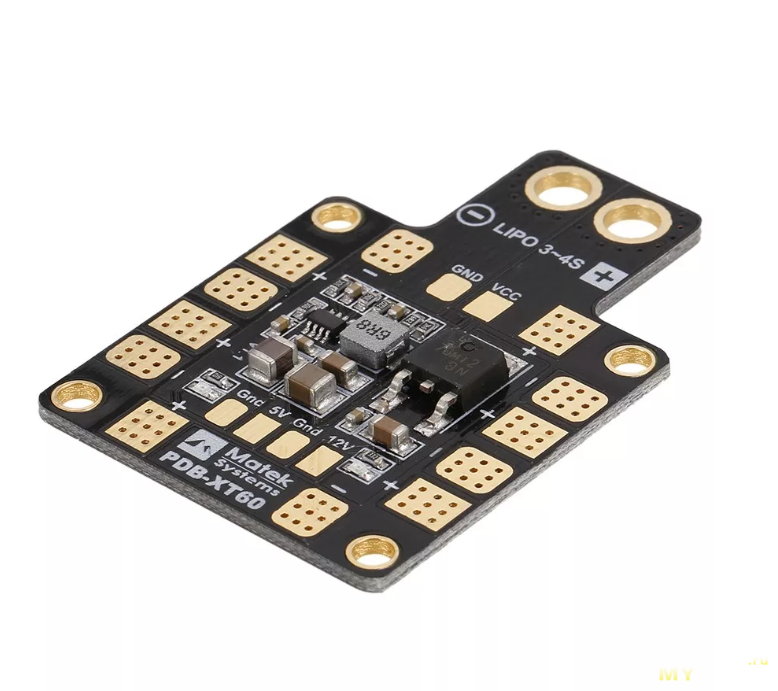 На ней уже есть выход питания на 12в, так что стабилизатор для питания подвеса теперь не нужен. Ну вот теперь с самим дроном действительно все. Налетал в таком виде около 10 акумуляторов, претензий нет. Пора устанавливать подвес и камеру. Поначалу хотел сделать подвес консольного типа (это когда демпферная площадка находится не сверху, а позади камеры ) как на TBS Discovery. Для этого разбираем подвес и делаем для него несколько новых деталей …
На ней уже есть выход питания на 12в, так что стабилизатор для питания подвеса теперь не нужен. Ну вот теперь с самим дроном действительно все. Налетал в таком виде около 10 акумуляторов, претензий нет. Пора устанавливать подвес и камеру. Поначалу хотел сделать подвес консольного типа (это когда демпферная площадка находится не сверху, а позади камеры ) как на TBS Discovery. Для этого разбираем подвес и делаем для него несколько новых деталей … У меня нет ни 3D принтера, ни ЧПУ станка, по этому все делал болгаркой и напильником. Собрал подвес в черновую, получилось вот так….
У меня нет ни 3D принтера, ни ЧПУ станка, по этому все делал болгаркой и напильником. Собрал подвес в черновую, получилось вот так…. Размеры и внешний вид меня полностью устроили и я приступил к покраске и окончательной сборке подвеса. В итоге вот что получилось
Размеры и внешний вид меня полностью устроили и я приступил к покраске и окончательной сборке подвеса. В итоге вот что получилось 
 Подвес подключается к выводам 12В на плате распределения питания и выходу S6 полетного контролера для управления камерой.
Подвес подключается к выводам 12В на плате распределения питания и выходу S6 полетного контролера для управления камерой.
Ну вот вроде бы все, пробуем взлететь и… К сожалению выяснилась одна неприятная особенность. Поток воздуха от передних винтов срывал камеру с места и подвес был не в силах ее стабилизировать. Я пробовал менять настройки, закрывать камеру сверху козырьком (колхоз, но все таки), ничего не помогало. Пришлось продать подвес Валкера и искать другой. Взял Tarot t-3d. Дело в том, что у данного подвеса есть один косяк (кроме фирменного завала горизонта конечно), расстояние между демпферами по длине еще нормальное, но вот по ширине они расположены очень близко друг к другу. Из-за это при ветре может наблюдаться раскачка подвеса и желе. Пришлось немного переделать его нижнюю пластину и расположить демпферы под углом. Такая конструкция зарекомендовала себя очень хорошо на прошлых вариантах подвесов. Далее все просто, креплю подвес на переходную пластину. Ее я сделал из текстолита и получилась она довольно веселой…. . И собственно устанавливаю готовый подвес на нее .
. И собственно устанавливаю готовый подвес на нее . . Подвес также подключил к выводам 12в с платы разводки питания, и к выводу S6 полетного контролера для управления наклоном. Сверху накрыл самодельной крышкой из стеклоткани и эпоксидки, что бы провода и платы не мозолили глаза. Собственно со сборкой наверное все, теперь немного о характеристиках. Расстояние по диагонали между осями моторов 380мм, взлетный вес 1.4кг. Дальность полета до конца не замерил, улетал на 3км и вернулся обратно, хотя управление и видео были без глюков, да и запас по батарее оставался. Думаю 3.5-3.7км вполне по силам пролететь. Высота полета неограничена, но я поднимался максимум на 250м. Время полета от батареи 4S 4200мАч 17-19мин. В сложенном состоянии лишь чуть больше аппаратуры радиоуправления ….
. Подвес также подключил к выводам 12в с платы разводки питания, и к выводу S6 полетного контролера для управления наклоном. Сверху накрыл самодельной крышкой из стеклоткани и эпоксидки, что бы провода и платы не мозолили глаза. Собственно со сборкой наверное все, теперь немного о характеристиках. Расстояние по диагонали между осями моторов 380мм, взлетный вес 1.4кг. Дальность полета до конца не замерил, улетал на 3км и вернулся обратно, хотя управление и видео были без глюков, да и запас по батарее оставался. Думаю 3.5-3.7км вполне по силам пролететь. Высота полета неограничена, но я поднимался максимум на 250м. Время полета от батареи 4S 4200мАч 17-19мин. В сложенном состоянии лишь чуть больше аппаратуры радиоуправления …. И вот такой размер в разложеном состоянии….
И вот такой размер в разложеном состоянии…. .
.
Ну и напоследок немного своих мыслей. Если вам нужен компактный коптер для съемки, то повторять этот проект не очень советую, если только вы не любите собирать, паять и настраивать больше, чем летать. Во первых, он выйдет не дешевле готовых коптеров, во вторых он потребует огромного количества терпения, внимания и усидчивости при настройке, к чему далеко не каждый готов. Что касается меня, то у меня вся периферия (видео очки, аппаратура радиоуправления, акумуляторы, зарядка и камера ) уже была и используется и на других моделях, по этому этот коптер не сильно ударил по карману. Ну и готовые коптеры мне в принципе не интересны, и летать смотря в телефон я вообще не могу. А вот и пример видео съемки с этого квадрика www.youtube.com/watch?v=5io3sqrCsDk&t=0s&list=PL9-3NMPHry-hSREdbJd5T7dOUbJO-mYBM&index=12
Вот такой вот получился рассказ. В чем ошибся, или накосячил, пишите в комментариях, обоснованную критику всегда поддерживаю. Всем пока