Создание и тестирование бесколлекторного мотора / Хабр
В этой статье мы хотели бы рассказать о том, как мы с нуля создали электрический мотор: от появления идеи и первого прототипа до полноценного мотора, прошедшего все испытания. Если данная статья покажется вам интересной, мы отдельно, более подробно, расскажем о наиболее заинтересовавших вас этапах нашей работы.
На картинке слева направо: ротор, статор, частичная сборка мотора, мотор в сборе
Вступление
Электрические моторы появились более 150 лет назад, однако за это время их конструкция не претерпела особых изменений: вращающийся ротор, медные обмотки статора, подшипники. С годами происходило лишь снижение веса электромоторов, увеличение КПД, а также точности управления скоростью.
Сегодня, благодаря развитию современной электроники и появлению мощных магнитов на основе редкоземельных металлов, удаётся создавать как никогда мощные и в то же время компактные и легкие “Бесколлекторные” электромоторы. При этом, благодаря простоте своей конструкции они являются наиболее надежными среди когда-либо созданных электродвигателей. Про создание такого мотора и пойдет речь в данной статье.
При этом, благодаря простоте своей конструкции они являются наиболее надежными среди когда-либо созданных электродвигателей. Про создание такого мотора и пойдет речь в данной статье.
Описание мотора
В “Бесколлекторных моторах” отсутствует знакомый всем по разборке электроинструмента элемент “Щетки”, роль которых заключается в передаче тока на обмотку вращающегося ротора. В бесколлекторных двигателях ток подается на обмотки не-двигающегося статора, который, создавая магнитное поле поочередно на отдельных своих полюсах, раскручивает ротор, на котором закреплены магниты.
Первый такой мотор был напечатан нами 3D принтере как эксперимент. Вместо специальных пластин из электротехнической стали, для корпуса ротора и сердечника статора, на который наматывалась медная катушка, мы использовали обычный пластик. На роторе были закреплены неодимовые магниты прямоугольного сечения. Естественно такой мотор был не способен выдать максимальную мощность. Однако этого хватило, что бы мотор раскрутился до 20к rpm, после чего пластик не выдержал и ротор мотора разорвало, а магниты раскидало вокруг. Данный эксперимент сподвиг нас на создание полноценного мотора.
Данный эксперимент сподвиг нас на создание полноценного мотора.
Узнав мнение любителей радиоуправляемых моделей, в качестве задачи, мы выбрали мотор для гоночных машинок типоразмера “540”, как наиболее востребованного. Данный мотор имеет габариты 54мм в длину и 36мм в диаметре.
Ротор нового мотора мы сделали из единого неодимового магнита в форме цилиндра. Магнит эпоксидкой приклеили на вал выточенный из инструментальной стали на опытном производстве.
Статор мы вырезали лазером из набора пластин трансформаторной стали толщиной 0.5мм. Каждая пластина затем была тщательно покрыта лаком и затем из примерно 50 пластин склеивался готовый статор. Лаком пластины покрывались чтобы избежать замыкания между ними и исключить потери энергии на токах Фуко, которые могли бы возникнуть в статоре.
Корпус мотора был выполнен из двух алюминиевых частей в форме контейнера. Статор плотно входит в алюминиевый корпус и хорошо прилегает к стенкам. Такая конструкция обеспечивает хорошее охлаждение мотора.
Такая конструкция обеспечивает хорошее охлаждение мотора.
Измерение характеристик
Для достижения максимальных характеристик своих разработок, необходимо проводить адекватную оценку и точное измерение характеристик. Для этого нами был спроектирован и собран специальный диностенд.
Основным элементом стенда является тяжёлый груз в виде шайбы. Во время измерений, мотор раскручивает данный груз и по угловой скорости и ускорению рассчитываются выходная мощность и момент мотора.
Для измерения скорости вращения груза используется пара магнитов на валу и магнитный цифровой датчик A3144 на основе эффекта холла. Конечно, можно было бы измерять обороты по импульсам непосредственно с обмоток мотора, поскольку данный мотор является синхронным. Однако вариант с датчиком является более надёжным и он будет работать даже на очень малых оборотах, на которых импульсы будут нечитаемы.
Кроме оборотов наш стенд способен измерять ещё несколько важных параметров:
- ток питания (до 30А) с помощью датчика тока на основе эффекта холла ACS712;
- напряжение питания.
 Измеряется непосредственно через АЦП микроконтроллера, через делитель напряжения;
Измеряется непосредственно через АЦП микроконтроллера, через делитель напряжения; - температуру внутри/снаружи мотора. Температура измеряется посредством полупроводникового термосопротивления;
 Измеряется непосредственно через АЦП микроконтроллера, через делитель напряжения;
Измеряется непосредственно через АЦП микроконтроллера, через делитель напряжения;Для сбора всех параметров с датчиков и передачи их на компьютер используется микроконтроллер серии AVR mega на плате Arduino nano. Общение микроконтроллера с компьютером осуществляется посредством COM порта. Для обработки показаний была написана специальная программа записывающая, усредняющая и демонстрирующая результаты измерений.
В результате наш стенд способен измерять в произвольный момент времени следующие характеристики мотора:
- потребляемый ток;
- потребляемое напряжение;
- потребляемая мощность;
- выходная мощность;
- обороты вала;
- момент на валу;
- КПД;
- мощность уходящая в тепло;
- температура внутри мотора.
Видео демонстрирующее работу стенда:
Результаты тестирования
Для проверки работоспособности стенда мы сначала испытали его на обычном коллекторном моторе R540-6022. Параметров для этого мотора известно достаточно мало, однако этого хватило, чтобы оценить результаты измерения, которые получились достаточно близкими к заводским.
Параметров для этого мотора известно достаточно мало, однако этого хватило, чтобы оценить результаты измерения, которые получились достаточно близкими к заводским.
Затем уже был испытан наш мотор. Естественно он смог показать лучшее КПД(65% против 45%) и при этом больший момент(1200 против 250 г на см), чем обычный мотор. Измерение температуры тоже дало достаточно хорошие результаты, во время тестирования мотор не нагревался выше 80 градусов.
Но на данный момент измерения пока не окончательны. Нам не удалось измерить мотор в полном диапазоне оборотов из-за ограничения мощности источника питания. Также предстоит сравнить наш мотор с аналогичными моторами конкурентов и испытать его “в бою”, поставив на гоночную радиоуправляемую машину и выступить на соревнованиях.
Бесколлекторный двигатель — достоинства и использование
Бесколлекторный двигатель имеет довольно высокий КПД – около 93%. Он может развить и большую мощность. Его главное достоинство – отсутствие щеточного узла, что сразу повышает надежность. В этом случае срок службы прибора зависит только от срока службы его подшипников. Он гораздо меньше шумит по сравнению с коллекторными двигателями. Благодаря своим свойствам, они нашли широкое применение. Например, они входят в состав запорной арматуры в нефтегазовой промышленности, так как у них отсутствуют щеточные узлы, значит, нет искрения. В автомобилестроении их используют в качестве двигателей для стеклоочистителей, стеклоподъемников. Они также применяются в медицинском оборудовании, робототехнике.
В этом случае срок службы прибора зависит только от срока службы его подшипников. Он гораздо меньше шумит по сравнению с коллекторными двигателями. Благодаря своим свойствам, они нашли широкое применение. Например, они входят в состав запорной арматуры в нефтегазовой промышленности, так как у них отсутствуют щеточные узлы, значит, нет искрения. В автомобилестроении их используют в качестве двигателей для стеклоочистителей, стеклоподъемников. Они также применяются в медицинском оборудовании, робототехнике.
Суть его состоит в том, что бесколлекторный двигатель представляет собой машину постоянного тока с индуктором – ротором и обмоткой якоря, выполненной на статоре. Функцию отсутствующего щеточного узла выполняет полупроводниковый коммутатор, который запитывает обмотки якоря и переключает их в соответствии с положением ротора. Самым часто встречающимся вариантом является бесколлекторный двигатель с трехфазной обмоткой статора.
Ротор может представлять различные варианты по конструкции, что зависит от расположения на нем магнитов. В результате взаимодействия двух магнитных потоков, от статора и ротора возникает крутящий момент. С помощью датчиков положения ротора угол между двумя потоками всегда будет поддерживаться в диапазоне 90°, что и будет создавать максимальный крутящий момент. Запитываться обмотки статора могут от любого полупроводникового преобразователя.
В результате взаимодействия двух магнитных потоков, от статора и ротора возникает крутящий момент. С помощью датчиков положения ротора угол между двумя потоками всегда будет поддерживаться в диапазоне 90°, что и будет создавать максимальный крутящий момент. Запитываться обмотки статора могут от любого полупроводникового преобразователя.
Изготовление самодельных бесколлекторных двигателей
Эти устройства очень притягательны для авиамоделистов, так как в течение нескольких секунд набирают предельные обороты. Именно они пытаются изготовить бесколлекторный двигатель своими руками в домашних условиях, так как выпускаемые промышленностью бесколлекторные модели очень дороги. Корпус, как правило, точится из дюралюминия. Магниты берутся от старых CD-приводов.
Ротор таких двигателей имеет от двух до восьми пар полюсов. Статор состоит из корпуса, а также из сердечника, который изготавливается из электротехнической стали и обмотки из меди, которая укладывается в специальные пазы по периметру сердечника.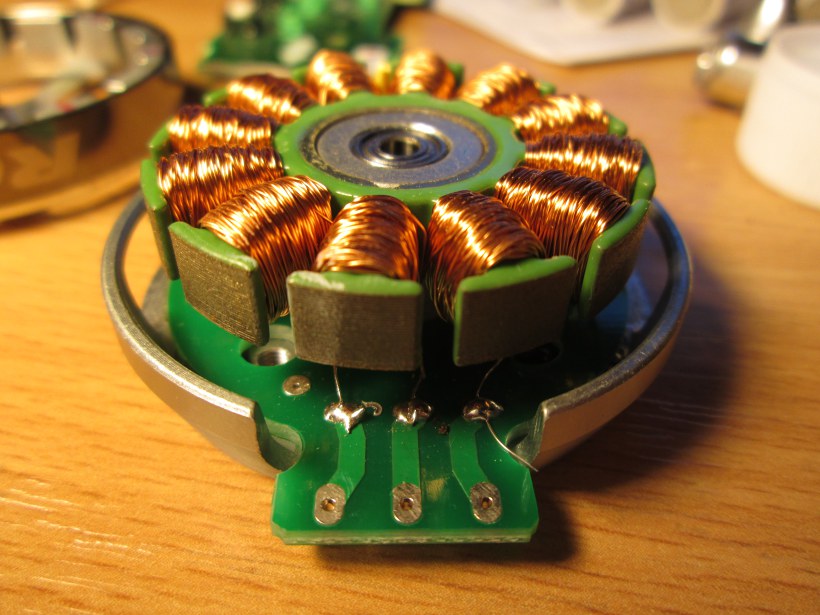 Количество обмоток соответствует количеству фаз двигателя, а они могут быть однофазными, двух-, трехфазными и более. Переключение между обмотками выполняется электронными схемами – инверторами. Сборка всего устройства производится в следующем порядке:
Количество обмоток соответствует количеству фаз двигателя, а они могут быть однофазными, двух-, трехфазными и более. Переключение между обмотками выполняется электронными схемами – инверторами. Сборка всего устройства производится в следующем порядке:
— магниты устанавливаются в нужном порядке;
— на валу нарезается резьба;
— далее сверлятся отверстия для облегчения веса и охлаждения ;
— выполняется обмотка статора медной проволокой;
— припаиваются разъемы;
— устанавливаются подшипники;
— устанавливаются стопорные кольца.
Далее собранный бесколлекторный двигатель подключается к источнику питания и проверяется его работоспособность. Если все нормально функционирует, то можно выполнять его установку на модель самолета. Таким образом, самодельный бесколлекторный двигатель вполне возможно создать.
Двигатель из болтов и магнитов своими руками | Мастерская Самоделок
Приветствую всех любителей электродвигателей.
Сегодня я расскажу, как сделал самодельный мотор, используя всего три болта, немного проволоки и магниты.
Чтобы сделать мотор понадобиться три болта М6 с гайками, подшипник, дощечка, неодимовые магниты 8 мм, металлическая пластина и контроллер для запуска бесщеточных двигателей.
Первым делом в дощечке просверлил отверстия под болты и по центру для крепления ротора.
Сверло на 7мм идеально подошлоСверло на 7мм идеально подошло
Намотал на болты изоляцию в виде малярного скотча и начал делать обмотку, направление в одну сторону и количество витков должно быть одинаковым.
Болты с катушками готовыБолты с катушками готовы
Из металлической пластины вырезал окружность и сделал разметку. Приклеил к ней по центру крепление подшипника и с помощью оргстекла установил неодимовые магниты, поочередно меняя их полярность.
Получился вот такой ротор на подшипникеПолучился вот такой ротор на подшипнике
Подключил к выводам катушек контроллер и сделал первый запуск.
Первый запуск произошел удачно, могу сказать одно, хоть обороты и большие, но крутящий момент маленький.
Я захотел более плавной работы мотора и сделал его на шести болтах и добавил магнитов, их стало 12.
Магниты ставил поочередно, меняя полярностьМагниты ставил поочередно, меняя полярность
В этот раз закрепил все на металлической пластине.
Теперь места для намотки стало большеТеперь места для намотки стало больше
Установил ротор на свое место.
Зазор между магнитами и катушками около 2ммЗазор между магнитами и катушками около 2мм
Запустил мотор, обороты стали медленнее, но вырос крутящий момент и стабильность мотора.
Самодельный мотор из болтов был экспериментом и довольно удачным, опытным путем я понял, что сделать мотор с нуля реально и легко.
Кому понравилась статья поддержите меня лайком, а также не забывайте подписаться на канал.
Всем большое спасибо за дочитывание, успехов и побольше позитива.
Как сделать простейший драйвер для двигателя старого HDD
Устройство представляет собой электронный коммутатор и предназначено для работы с маломощными бесколлекторными (иначе бесщеточными) электродвигателями при условии соединения их обмоток звездой. Типичный пример таких агрегатов — привод дисковода классических винчестерских дисков персональных компьютеров.
Отличается схемной простотой и собирается на недефицитных деталях, которые хорошо представлены в интернет-торговле.
Схемные особенности
Устройство выполнено по схеме 3-фазного мультивибратора на полевых транзисторах с изолированным затвором, отдельные однотранзисторные каскады которого имеют идентичную структуру и соединены в кольцо. Каждый предыдущий каскад такого кольца управляет функционированием транзистора последующего. Стоки транзисторов соединены с обмотками двигателя напрямую.
Время нахождения транзисторов схемы в активном состоянии определяется последовательной RC-цепочкой, напряжение со средней точки которой подается на затвор.
Принципиальная схема устройства представлена на рисунке.
В составе схемы устройства задействованы следующие компоненты:Транзисторы снабжены пластинчатым радиатором, который имеет прямую гальваническую связь со стоком. С учетом невысокой мощности управляемого бесколлекторного электродвигателя необходимость фиксации радиатора на корпусе с низким тепловым сопротивлением отсутствует. Цоколевка и рекомендуемое при сборке направление изгиба выводов представлены на рисунке.
Изготовление устройства
Схема устройства достаточно проста и не требует обязательного применения монтажной платы. С учетом ее рядной структуры в качестве силового несущего элемента может быть использована проволочная шина диаметром 1 – 2 мм, которая соединяется с плюсом источника питания. Общий вывод обмоток подключается на минус источника питания.
Подключается к трехфазному двигателю жесткого диска с общим проводом.
При сборке необходимо контролировать отсутствие коротких замыканий между отдельными неизолированными соединениями, при необходимости применяют кембрики.
Устройство при отсутствии ошибок в схеме начинает функционировать немедленно после подачи постоянного напряжения. Частоту вращения ротора двигателя можно менять заменой конденсаторов или резисторов, причем все устанавливаемые пассивные компоненты должны иметь одинаковый номинал.
Смотрите видео
Управление бесколлекторным двигателем по сигналам обратной ЭДС – понимание процесса
Когда я начал разрабатывать блок управления бесколлекторным двигателем (мотор-колесом), было много вопросов о том, как сопоставить реальный двигатель с абстрактной схемой из трех обмоток и магнитов, на которой, как правило, все объясняют принцип управления бесколлекторными двигателями.
Когда я реализовал управление по датчикам Холла я еще не очень понимал, что происходит в двигателе дальше абстрактных трех обмоток и двух полюсов: почему 120 градусов и почему алгоритм управления именно такой.
Все встало на место, когда я начал разбираться в идее бездатчикового управления бесколлекторным двигателем — понимание процесса, происходящего в реальной железке, помогло разработать аппаратную часть и понять алгоритм управления.
Ниже я постараюсь расписать свой путь к пониманию принципа управления бесколлекторным двигателем постоянного тока.
Для работы бесколлекторного двигателя необходимо чтобы постоянное магнитное поле ротора увлекалось за вращающемся электромагнитным полем статора, как и в обычном ДПТ.
Вращение магнитного поля статора осуществляется коммутацией обмоток с помощью электронного блока управления.
Конструкция бесколлекторного двигателя схожа с конструкцией синхронного двигателя, если подключить бесколлекторный двигатель в трехфазную сеть переменного тока, удовлетворяющую электрическим параметрам двигателя, он будет работать.
Определенная коммутация обмоток бесколлекторного двигателя позволяет управлять им от источника постоянного тока. Чтобы понять, как составить таблицу коммутаций бесколлекторного двигателя необходимо рассмотреть управление синхронной машиной переменного тока.
Чтобы понять, как составить таблицу коммутаций бесколлекторного двигателя необходимо рассмотреть управление синхронной машиной переменного тока.
Синхронная машина
Синхронная машина управляется от трехфазной сети переменного тока. Двигатель имеет 3 электрические обмотки, смещенные между собой на 120 электрических градусов.
Запустив трехфазный двигатель в генераторном режиме, постоянным магнитным полем будет наводиться ЭДС на каждую из обмоток двигателя, обмотки двигателя распределены равномерно, на каждую из фаз будет наводиться синусоидальное напряжение и данные сигналы будут смещены между собой на 1/3 периода (рисунок 1). Форма ЭДС меняется по синусоидальному закону, период синусоиды равен 2П(360), поскольку мы имеем дело с электрическими величинами (ЭДС, напряжение, ток) назовем это электрическими градусами и будем измерять период в них.
При подаче на двигатель трехфазного напряжения в каждый момент времени на каждой обмотке будет некое значение силы тока.
Рисунок 1. Вид сигнала трехфазного источника переменного тока.
Каждая обмотка формирует вектор магнитного поля пропорциональный току на обмотке. Сложив 3 вектора можно получить результирующий вектор магнитного поля. Так как с течением времени ток на обмотках двигателя меняется по синусоидальному закону, меняется величина вектора магнитного поля каждой обмотки, а результирующий суммарный вектор меняет угол поворота, при этом величина данного вектора остается постоянной.
Рисунок 2. Один электрический период трехфазного двигателя.
На рисунке 2 изображен один электрический период трехфазного двигателя, на данном периоде обозначено 3 произвольных момента, чтобы построить в каждом из этих моментов вектора магнитного поля отложим данный период, 360 электрических градусов, на окружности. Разместим 3 обмотки двигателя сдвинутые на 120 электрических градусов относительно друг друга (рисунок 3).
Рисунок 3. Момент 1. Вектора магнитного поля каждой обмотки (слева) и результирующий вектор магнитного поля (справа).
Вдоль каждой из фаз построен вектор магнитного поля, создаваемый обмоткой двигателя. Направление вектора определяется направлением постоянного тока в обмотке, если напряжение, прикладываемое к обмотке положительно, то вектор направлен в противоположную сторону от обмотки, если отрицательное, то вдоль обмотки. Величина вектора пропорциональна величине напряжения на фазе в данный момент.
Чтобы получить результирующий вектор магнитного поля необходимо сложить данные вектора по закону сложения векторов.
Аналогично построение для второго и третьего моментов времени.
Рисунок 4. Момент 2. Вектора магнитного поля каждой обмотки (слева) и результирующий вектор магнитного поля (справа).
Так, с течение времени, результирующий вектор плавно меняет свое направление, на рисунке 5 изображены получившиеся вектора и изображен полный поворот магнитного поля статора за один электрический период.
Рисунок 5. Вид вращающегося магнитного поля формируемого обмотками на статоре двигателя.
За этим вектором электрического магнитного поля увлекается магнитное поле постоянных магнитов ротора в каждый момент времени (рисунок 6).
Рисунок 6. Постоянный магнит (ротор) следует направлению магнитного поля формируемого статором.
Так работает синхронная машина переменного тока.
Имея источник постоянного тока необходимо самостоятельно формировать один электрический период со сменой направлений тока на трех обмотках двигателя. Поскольку бесколлекторный двигатель по конструкции такой же, как синхронный, в генераторном режиме имеет идентичные параметры, необходимо отталкиваться от рисунка 5, где изображено сформированное вращающееся магнитное поле.
Постоянное напряжение
Источник постоянного тока имеет только 2 провода «плюс питания» и «минус питания» это значит, что есть возможность подавать напряжение только на две из трех обмоток. Необходимо аппроксимировать рисунок 5 и выделить все моменты, при которых возможно скоммутировать 2 фазы из трех.
Необходимо аппроксимировать рисунок 5 и выделить все моменты, при которых возможно скоммутировать 2 фазы из трех.
Число перестановок из множества 3 равняется 6, следовательно, имеется 6 вариантов подключения обмоток.
Изобразим возможные варианты коммутаций и выделим последовательность, при которой вектор будет шаг за шагом проворачиваться далее пока не дойдет до конца периода и не начнет сначала.
Электрический период будем отсчитывать от первого вектора.
Рисунок 7. Вид шести векторов магнитного поля которые можно создать от источника постоянного тока коммутацией двух из трех обмоток.
На рисунке 5 видно, что при управлении трехфазным синусоидальным напряжением имеется множество векторов плавно проворачивающихся с течением времени, а при коммутации постоянным током возможно получить вращающееся поле только из 6 векторов, то есть переключение на следующий шаг должно происходить каждые 60 электрических градусов.
Результаты из рисунка 7 сведены в таблицу 1.
Таблица 1. Полученная последовательность коммутаций обмоток двигателя.
| Плюс питания | Минус питания | Обмотка не подключена |
| W | U | V |
| W | V | U |
| U | V | W |
| U | W | V |
| V | W | U |
| V | U | W |
Вид получившегося управляющего сигнала в соответствии с таблицей 1 изображен на рисунке 8. Где -V коммутация на минус источника питания (GND), а +V коммутация на плюс источника питания.
Рисунок 8. Вид управляющих сигналов от источника постоянного тока для бесколлекторного двигателя. Желтый – фаза W, синий – U, красный – V.
Однако реальная картина с фаз двигателя будет похожа на синусоидальный сигнал из рисунка 1. У сигнала образуется трапециевидная форма, так как в моменты, когда обмотка двигателя не подключена, постоянные магниты ротора наводят на нее ЭДС (рисунок 9).
Рисунок 9. Вид сигнала с обмоток бесколлекторного двигателя в рабочем режиме.
На осциллографе это выглядит так:
Рисунок 10. Вид окна осциллографа при измерении одной фазы двигателя.
Конструктивные особенности
Как было сказано ранее за 6 переключений обмоток формируется один электрический период 360 электрических градусов.
Необходимо связать данный период с реальным углом вращения ротора. Двигатели с одной парой полюсов и трехзубым статором применяются крайне редко, двигатели имеют N пар полюсов.
На рисунке 11 изображены модели двигателя с одной парой полюсов и с двумя парами полюсов.
а. б.
Рисунок 11. Модель двигателя с одной (a) и с двумя (б) парами полюсов.
Двигатель с двумя парами полюсов имеет 6 обмоток, каждая из обмоток парная, каждая группа из 3 обмоток смещена между собой на 120 электрических градусов. На рисунке 12б. отложен один период для 6 обмоток. Обмотки U1-U2, V1-V2, W1-W2 соединены между собой и в конструкции представляют 3 провода вывода фаз. Для простоты рисунка не отображены соединения, но следует запомнить, что U1-U2, V1-V2, W1-W2 одно и то же.
На рисунке 12б. отложен один период для 6 обмоток. Обмотки U1-U2, V1-V2, W1-W2 соединены между собой и в конструкции представляют 3 провода вывода фаз. Для простоты рисунка не отображены соединения, но следует запомнить, что U1-U2, V1-V2, W1-W2 одно и то же.
На рисунке 12, исходя из данных таблицы 1, изображены вектора для одной и двух пар полюсов.
а. б.
Рисунок 12. Схема векторов магнитного поля для двигателя с одной (a) и с двумя (б) парами полюсов.
На рисунке 13 изображены вектора, созданные 6 коммутациями обмоток двигателя с одной парой полюсов. Ротор состоит из постоянных магнитов, за 6 шагов ротор провернется на 360 механических градусов.
На рисунке обозначены конечные положения ротора, в промежутках между двумя соседними положениями ротор проворачивается от предыдущего к следующему скоммутированному состоянию. Когда ротор достигает данного конечного положения, должно происходить следующее переключение и ротор будет стремиться к новому заданному положению, так чтобы его вектор магнитного поля стал сонаправлен с вектором электромагнитного поля статора.
Когда ротор достигает данного конечного положения, должно происходить следующее переключение и ротор будет стремиться к новому заданному положению, так чтобы его вектор магнитного поля стал сонаправлен с вектором электромагнитного поля статора.
Рисунок 13. Конечные положения ротора при шестиступенчатой коммутации бесколлекторного двигателя с одной парой полюсов.
В двигателях с N парами полюсов необходимо пройти N электрических периодов для полного механического оборота.
Двигатель с двумя парами полюсов будет иметь два магнита с полюсами S и N, и 6 обмоток (рисунок 14). Каждая группа из 3 обмотки смещены друг относительно друга на 120 электрических градусов.
Рисунок 14. Конечные положения ротора при шестиступенчатой коммутации бесколлекторного двигателя с двумя парами полюсов.
Определение положения ротора бесколлекторного двигателя
Как было сказано ранее для работы двигателя необходимо в нужные моменты времени подключать напряжение на нужные обмотки статора. Подавать напряжение на обмотки двигателя нужно в зависимости от положения ротора, так чтобы магнитное поле статора всегда опережало магнитное поле ротора. Для определения положения ротора двигателя и коммутаций обмоток используют электронный блок управления.
Подавать напряжение на обмотки двигателя нужно в зависимости от положения ротора, так чтобы магнитное поле статора всегда опережало магнитное поле ротора. Для определения положения ротора двигателя и коммутаций обмоток используют электронный блок управления.
Отслеживание положения ротора возможно несколькими способами:
1. По датчикам Холла
2. По обратной ЭДС
Как правило, датчиками Холла производители оснащают двигатель при выпуске, поэтому это самый распространённый метод управления.
Коммутирование обмоток в соответствии с сигналами обратной ЭДС позволяет отказаться от датчиков встроенных в двигатель и использовать в качестве датчика анализ свободной фазы двигателя, на которую будет наводиться магнитным полем противо-ЭДС.
Управление бесколлекторным двигателем с датчиками Холла
Чтобы коммутировать обмотки в нужные моменты времени необходимо отслеживать положение ротора в электрических градусах. Для этого применяются датчики Холла.
Поскольку имеется 6 состояний вектора магнитного поля необходимо 3 датчика Холла, которые будут представлять один абсолютный датчик положения с трехбитным выходом. Датчики Холла устанавливаются также как обмотки, смещенные между собой на 120 электрических градусов. Это позволяет использовать магниты ротора в качестве воздействующего элемента датчика.
Рисунок 15. Сигналы с датчиков Холла за один электрический оборот двигателя.
Для вращения двигателя необходимо чтобы магнитное поле статора опережало магнитное поле ротора, положение, когда вектор магнитного поля ротора сонаправлен с вектором магнитного поля статора является конечным для данной коммутации, именно в этот момент должно происходить переключение на следующую комбинацию, чтобы не давать ротору зависать в стационарном положении.
Cопоставим сигналы с датчиков Холла с комбинацией фаз которые необходимо скоммутировать (таблица 2)
Таблица 2. Сопоставление сигналов датчиков Холла с коммутацией фаз двигателя.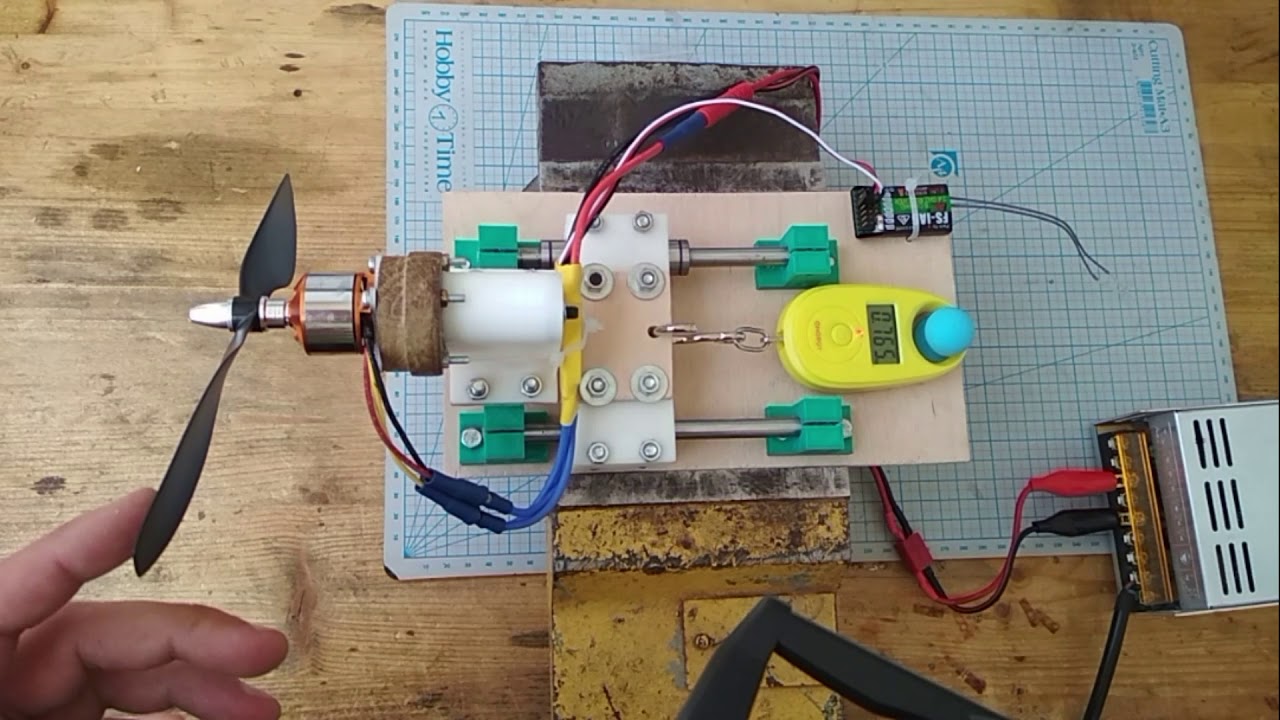
| Положение двигателя | HU(1) | HV(2) | HW(3) | U | V | W |
| 0 | 0 | 0 | 1 | 0 | — | + |
| 1 | 0 | 1 | + | — | 0 | |
| 1 | 0 | 0 | + | 0 | — | |
| 1 | 1 | 0 | 0 | + | — | |
| 0 | 1 | 0 | — | + | 0 | |
| 360/N | 0 | 1 | 1 | — | 0 | + |
При равномерном вращении двигателя с датчиков поступает сигнал смещенный на 1/6 периода, 60 электрических градусов (рисунок 16).
Рисунок 16. Вид сигнала с датчиков Холла.
Управление с помощью сигнала обратной ЭДС
Существуют бесколлекторный двигатели без датчиков положения. Определение положения ротора осуществляется с помощью анализа сигнала ЭДС на свободной фазе двигателя. В каждый момент времени к одной из фаз подключен «+» к другой «-» питания, одна из фаз остается свободной. Вращаясь, магнитное поле ротора наводит ЭДС в свободной обмотке. По мере вращения напряжение на свободной фазе изменяется (рисунок 17).
Определение положения ротора осуществляется с помощью анализа сигнала ЭДС на свободной фазе двигателя. В каждый момент времени к одной из фаз подключен «+» к другой «-» питания, одна из фаз остается свободной. Вращаясь, магнитное поле ротора наводит ЭДС в свободной обмотке. По мере вращения напряжение на свободной фазе изменяется (рисунок 17).
Рисунок 17. Изменение напряжения на фазе двигателя.
Сигнал с обмотки двигателя разбит на 4 момента:
1. Обмотка подключена к 0
2. Обмотка не подключена (свободная фаза)
3. Обмотка подключена к питающему напряжению
4. Обмотка не подключена (свободная фаза)
Сопоставив сигнал с фаз с управляющим сигналом, видно, что момент перехода на следующее состояние можно детектировать пересечением средней точки (половины питающего напряжения) с фазой, которая в данный момент не подключена (рисунок 18).
Рисунок 18. Сопоставление управляющего сигнала с сигналом на фазах двигателя.
Сопоставление управляющего сигнала с сигналом на фазах двигателя.
После детектирования пересечения необходимо выдержать паузу и включать следующее состояние. По данному рисунку составлен алгоритм переключений состояний обмоток (таблица 3).
Таблица 3. Алгоритм переключения обмоток двигателя
| Текущее состояние | U | V | W | Следующее состояние |
| 1 | — | Ожидание пересечения средней точки из + в — | + | 2 |
| 2 | Ожидание пересечения средней точки из — в + | — | + | 3 |
| 3 | + | — | Ожидание пересечения средней точки из + в — | 4 |
| 4 | + | Ожидание пересечения средней точки из — в + | — | 5 |
| 5 | Ожидание пересечения средней точки из + в — | + | — | 6 |
| 6 | — | + | Ожидание пересечения средней точки из — в + | 1 |
Пересечение средней точки проще всего детектировать компаратором, на один вход компаратора подается напряжение средней точки, а на второй текущее напряжение фазы.
Рисунок 19. Детектирование средней точки компаратором.
Компаратор срабатывает в момент перехода напряжения через среднюю точку и генерирует сигнал для микроконтроллера.
Обработка сигнала с фаз двигателя
Однако сигнал с фаз при регулировании скорости ШИМ отличается видом, и имеет импульсный характер (рисунок 21), в таком сигнале невозможно детектировать пересечение со средней точкой.
Рисунок 20. Вид сигнала фазы при регулировании скорости ШИМ.
Поэтому данный сигнал следует отфильтровать RC фильтром чтобы получить огибающую, а так же разделить под требования компаратора. По мере увеличения скважности шим сигнал будет возрастать по амплитуде (рисунок 22).
Рисунок 21. Схема делителя и фильтра сигнала с фазы двигателя.
Рисунок 22. Огибающая сигнала при изменении скважности ШИМ.
Огибающая сигнала при изменении скважности ШИМ.
Схема со средней точкой
Рисунок 23. Вид виртуальная средней точки. Картинка взята с avislab.com/
С фаз снимаются сигналы через токограничительные резисторы и объединяются, получается вот такая картина:
Рисунок 24. Вид осциллограммы напряжения виртуальной средней точки.
Из-за ШИМ, напряжение средней точки не постоянно, сигнал так же необходимо фильтровать. Напряжение средней точки после сглаживания будет достаточно большим (в районе питающего напряжения двигателя), его необходимо разделить делителем напряжения до значения половины питающего напряжения.
После прохождения сигнала через фильтр колебания сглаживается и получается ровное напряжение относительно которого можно детектировать пересечение обратной ЭДС.
Рисунок 26. Напряжение после делителя и фильтра низких частот.
Средняя точка будет менять свое значение в зависимости от напряжения (скважности ШИМ), так же как и огибающая сигнала.
Полученные сигналы с компараторов заводятся на микроконтроллер, который их обрабатывает по алгоритму выше.
Пока на этом все.
Автор: Woofer46
Источник
асинхронный, синхронный или на постоянных магнитах?
Можно ли буксировать электромобили? Зависит от типа двигателя. Да, бывают разные. Если вы только собираетесь покупать электрокар, то знайте: до полной разрядки его лучше не доводить. И вот почему
Автомобили с двигателями внутреннего сгорания допускают буксировку. Если у вас механическая коробка передач, то это самое простое дело: ставите нейтраль в коробке передач или выжимаете сцепление – и ваш мотор оказывается физически отключен от колес, а машина превращается в обычную телегу: тяни не хочу.
С автоматами чуть сложнее, в них полного разрыва связи между колесами и мотором не предусмотрено.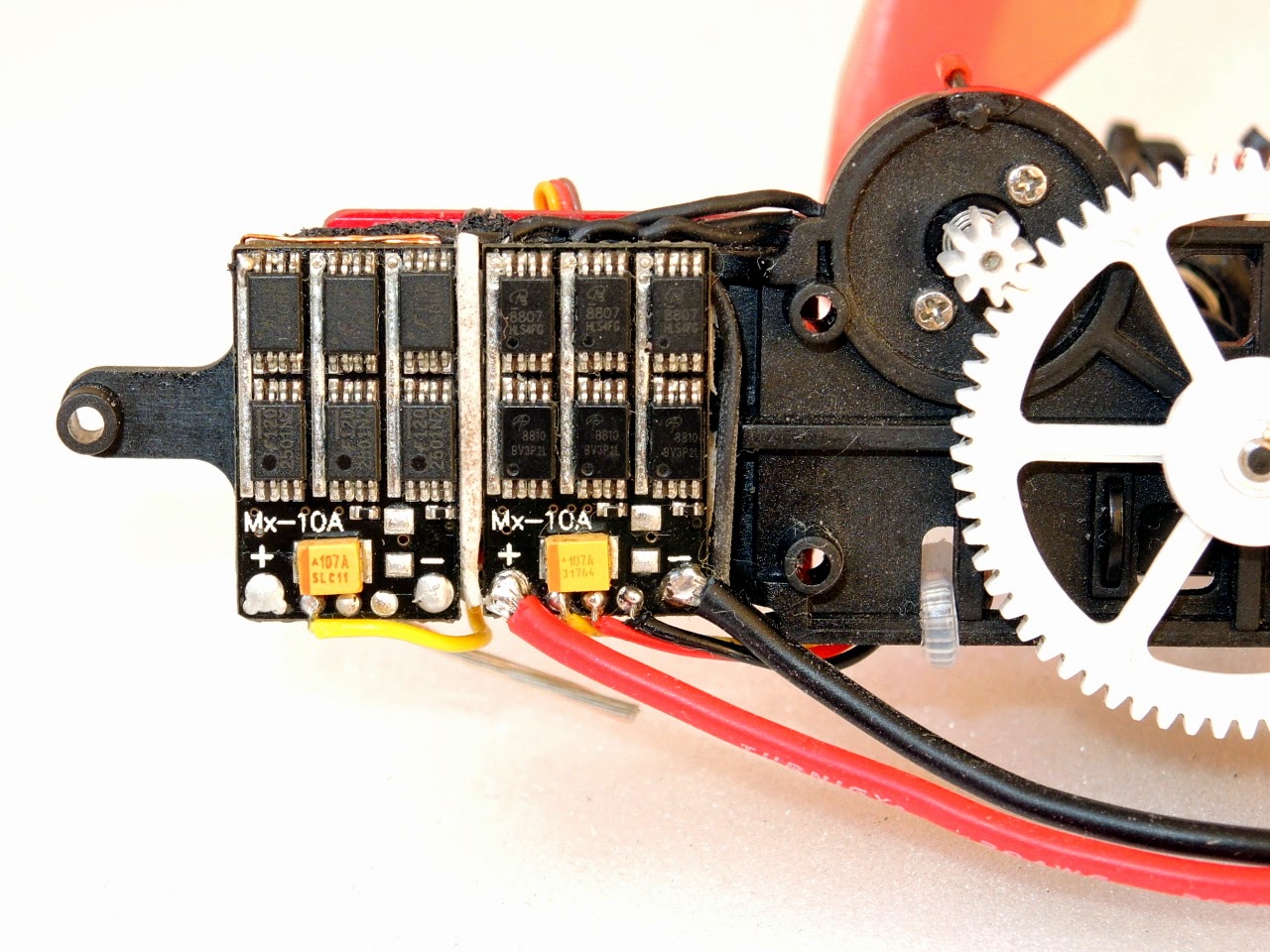 Но и они в режиме N позволяют буксировать машину на короткие расстояния и с невысокой скоростью.
Но и они в режиме N позволяют буксировать машину на короткие расстояния и с невысокой скоростью.
Однако в инструкциях к электромобилям вы прочтете, что буксировка или не допускается вовсе, или, как в случае с современными моделями Tesla, допускается со скоростью не более 5 км/ч на расстояние не более 10 метров: иными словами, вы в праве только оттолкать сломанную машину на обочину.
А может ли быть иначе? Да, старые модели Tesla такое позволяли. Как и GM EV1 – легенда электрокаров 90-х годов прошлого века. Так в чем же дело? В типе электрических двигателей. Или, если уж говорить совсем правильно, электрических машин, так как в электромобилях эти устройства служат не только двигателями, но и генераторами. И на современных типах электрокаров встречается три типа таких устройств. Но для начала немного истории.
В 1821 году британский ученый Майкл Фарадей в своей статье впервые описал основные принципы преобразования электроэнергии в движение. Фарадей уже знал, что электрический ток, проходя через проволоку, создает магнитное поле. Закрученный в катушку, такой провод становится электромагнитом.
Закрученный в катушку, такой провод становится электромагнитом.
Он также знал, что противоположные полюса магнитов притягиваются, а одинаковые – отталкиваются. В электромагнитах же полярность зависит от направления движения тока, то есть ее можно быстро менять. И вот что придумал Фарадей. Берем магнит, который движется к другому. В последний момент полярность меняется, но рядом расположен третий магнит, к которому можно тянуться. Затем четвертый, пятый. Эти разнополярные магниты выстроены в линию. И если ее закольцевать, движение будет идти по кругу до тех пор, пока сквозь электромагниты идет ток и пока его направление не перестает меняться.
Чтобы понять, как это действует, представьте, что у вас в руках два школьных магнита в форме подковы или буквы U – помните, были такие. Если их повернуть друг к другу взаимоотталкивающимися полюсами, то они будут стремиться сделать полуоборот, чтобы снова друг к другу притянуться. А теперь представьте, что их полюса постоянно меняются местами: тогда они станут вертеться друг относительно друга. Это и есть электродвигатель.
Это и есть электродвигатель.
Так впервые был описан принцип действия всех электромоторов в целом и самого древнего в частности: того, который работает от постоянного тока и использует с одной стороны постоянные магниты из намагниченного сплава, а с другой – переменные электромагниты. Это наш первый герой: мотор-генератор постоянного тока на перманентных магнитах.
Изобретения Фарадея были развиты его полседователями, в частности изобретателем электрической лампочки Томасом Эдисоном. Эдисон усовершенствовал генераторы постоянного тока и стал пионером в электрификации Нью-Йорка. В 1884 году на пороге его кабинета появился молодой сербский инженер. Звали иммигранта Никола Тесла.
Тесла предложил улучшить конструкцию Эдисона и попросил за работу 50 тысяч долларов – баснословная в те времена сумма. По легенде Эдисон согласился, но когда Тесла действительно существенно улучшил существующую модель, любимец Америки просто кинул безвестного сербского эмигранта.
Тесла рассердился и отправился к главному конкуренту, адепту переменного тока Джорджу Вестингаузу. Так началась «Война токов», окончательно проигранная постоянным током только в 2007 году, когда Нью-Йорк последним из городов перешел на ток переменный.
Так началась «Война токов», окончательно проигранная постоянным током только в 2007 году, когда Нью-Йорк последним из городов перешел на ток переменный.
Генераторы Эдисона вырабатывали электричество с напряжением, близким к потребительскому: 100-200 вольт. Это удобно для домов, но его сложно передавать на большие расстояния из-за сопротивления проводов. Тут было два решения: увеличивать диаметр кабелей или повышать напряжение. Первый вариант позволял делать линии длинной 1,5 километра. Да, совсем немного. Второй вариант был невозможен из-за отсутствия в те годы эффективных способов повышения напряжения постоянного тока.
Однако еще в 1876 году русский ученый Павел Яблочков изобрел трансформатор, меняющий напряжение переменного тока. Подача энергии на большие расстояния перестала быть проблемой.
Но была другая проблема. Лампочкам Эдисона все равно от какого тока питаться: постоянного или переменного. А вот с электродвигателями сложнее: они в те годы требовали только постоянного. В 1888 году Тесла запатентовал в США асинхронный электрический двигатель переменного тока. Он же изобрел и синхронный генератор, впоследствии использованный и как двигатель. Это второй и третий герои нашей статьи.
В 1888 году Тесла запатентовал в США асинхронный электрический двигатель переменного тока. Он же изобрел и синхронный генератор, впоследствии использованный и как двигатель. Это второй и третий герои нашей статьи.
Так поговорим же о них поподробнее
Если в детстве вам доводилось разбирать игрушечные электрические машинки, то вы должны помнить устройство их простейших двигателей. Для остальных напомним. Все применяемые в электромобилях моторы состоят из двух частей: неподвижного статора и вращающегося ротора.
В игрушечных машинах на статоре стоят постоянные магниты, а на роторе – электрические переменные. При вращении на них через специальные щетки подается постоянный ток от батареек, и их последовательное включение и обеспечивает движение.
Похожая конструкция встречается практически у всех электромобилей. С одним отличием: на роторе там стоят постоянные магниты, а на статоре, напротив, электрические и переменные. Так в том числе можно избавиться от щеток: одного из немногих элементов электродвигателя, который подвержен износу.
Преимущество моторов на постоянных машинах в том, что они легкие, компактные, мощные, эффективные, работают от вырабатываемого аккумуляторами постоянного тока… так, стоп! А какие недостатки?
Недостаток прост. Таким моторам не хватает тяги. Так перейдем же к асинхронным инверсионным моторам переменного тока.
Бородатый анекдот про умирающего мастера заваривать чай, который делился своим секретом словами «не жалейте заварки» – это прям притча про компанию Tesla. Вопреки расхожему мнению, ее основал не Илон Маск (он позже стал главным инвестором и владельцем), а Мартин Эберхард и его партнер Марк Тарпенинг.
Эти двое придумали немыслимое. Создать не тихоходный, эффективный и относительно дешевый электрокар, а дорогой, быстрый и клевый. Маск же первым идею оценил и быстро прибрал ее к рукам.
Имя компании Tesla не случайно. Одной из ее технических революций стало использование асинхронного двигателя без постоянных магнитов, работающего на переменном токе – того самого, который изобрел Никола Тесла. Эта конструкция дороже как сама по себе, так и благодаря необходимости в установке преобразователя постоянного тока от батареи в переменный для электродвигателя. Успешное решение данной задачи и стало первым из множества теперь уже легендарных прорывов «Теслы».
Эта конструкция дороже как сама по себе, так и благодаря необходимости в установке преобразователя постоянного тока от батареи в переменный для электродвигателя. Успешное решение данной задачи и стало первым из множества теперь уже легендарных прорывов «Теслы».
Благодаря мощному асинхронному мотору электрокары Tesla с самого начала были очень динамичным, что стало ключевой причиной роста их популярности. В таком моторе переменный ток в обмотке статора создает вращающееся магнитное поле. Оно вызывает индукцию в роторе, заставляя его вращаться чуть медленнее, чем вращение самого поля – поэтому двигатель и называется асинхронным. Если скорости вращения синхронизируются, поле перестает создавать в роторе индукцию, и он начинает замедляться, рассинхронизируясь обратно. Важно заметить, что собственно на ротор никакого электричества напрямую не подается.
Итак, есть еще третий тип электрического двигателя, который встречается в современных электромобилях: синхронный на электромагнитах.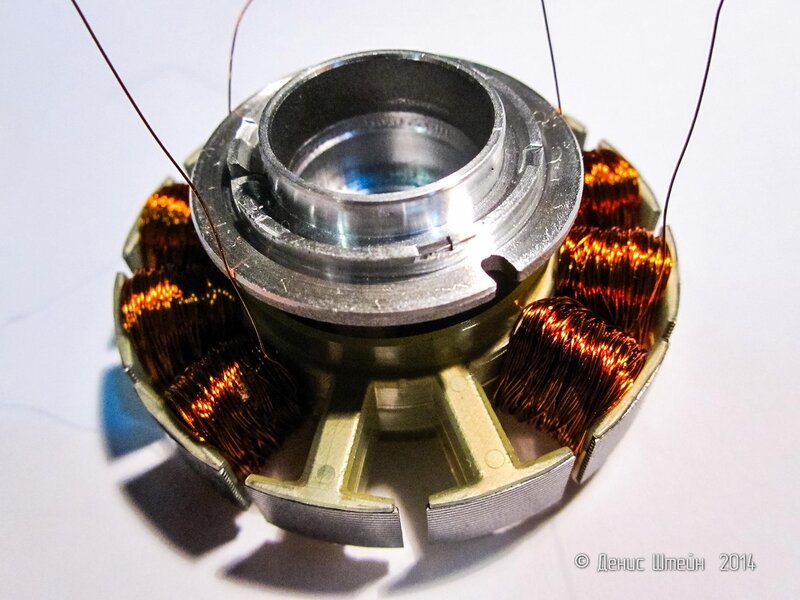 Он похож по устройству на двигатели с постоянными магнитами на роторе, только эти магниты – электрические. На них подается постоянный ток, так что полярность магнитов ротора остается неизменной. А вот полярность магнитов статора, напротив, меняется, что и обеспечивает вращение.
Он похож по устройству на двигатели с постоянными магнитами на роторе, только эти магниты – электрические. На них подается постоянный ток, так что полярность магнитов ротора остается неизменной. А вот полярность магнитов статора, напротив, меняется, что и обеспечивает вращение.
Такие синхронные моторы на электромагнитах славятся своей способностью обеспечивать стабильность оборотов и ставятся, обычно, на всякие установки вроде насосов. А еще… на электрокар Renault Zoe. Зачем? Честно сказать, найти быстрый ответ на этот вопрос не получилось. Можем лишь предположить, что это связано с лучшей способностью такого двигателя служить генератором, рекуперируя энергию торможения. Мотор на Zoe не самый мощный, а мощным генератором он быть обязан.
Так что же лучше? Большинство автоконцернов выбирает моторы на постоянных магнитах: они эффективнее. Tesla в первые годы настаивала на асинхронных моторах. Но потом… сделала ставку на двух моторную полнопривродную схему, в которой асинхронный мотор обеспечивает динамику, а двигатель на постоянных магнитах гарантирует низкий расход энергии при небольших нагрузках. И только Renault… ну вы поняли.
И только Renault… ну вы поняли.
А теперь о том, что ждет нас дальше. При буксировке даже обесточенный двигатель на постоянных магнитах тут же начинает работать как генератор, что чревато перегревом и возгоранием энергосистемы электромобиля. В синхронных моторах Renault оставшейся магнетизм в роторе также способен вызвать индукцию в катушках статора, ну и пошло поехало – генерация тока, перегрев, пожар.
И только асинхронные двигатели, когда их статоры не под напряжением, не являются генераторами: их можно буксировать.
Так вот, современная тенденция такова. Моторы на постоянных магнитах становятся все мощнее и тяговитее, оставаясь самыми эффективными. Производители постепенно переходят на них. Но придумать, как машины с ними безопасно буксировать инженерам еще предстоит. Пока они декларируют принцип «Наши электромобили не ломаются и в буксировке не нуждаются». Но звучит не больно убедительно.
Наборы фрез, граверы
Наборы фрез: описание, назначение, режимы реза
ХОББИ, $65
Включает 13 фрез, которые являются самым важным элементом любого станка (см. рис.1).
рис.1).
Назначение: Набор предназначен для тех, кто приобрел или самостоятельно собрал станок, и не предполагает, с чего начать.
Рисунок 1
«Хобби» подобран профессионалами, уже прошедшими этап начинающего фрезеровщика и знающими, что именно необходимо каждому начинающему мастеру, чтобы достичь успехов в этой интересной творческой работе. Набор, кроме перечня фрез, включает подробное описание фрез, их назначение, скорость подачи, указываются обороты шпинделя и перечень данных, которые следует ввести в программу. Также в описании приводится ряд других важных моментов для продуктивной работы и рекомендации по предотвращению поломок фрез и увеличению срока их эксплуатации. Данный комплект включает китайские качественные недорогие фрезы, которых даже в случае поломки в процессе обучения не будет жаль, ведь они имеют очень низкую стоимость. Обращаем ваше внимание на то, что набор включает качественные фрезы по китайским стандартам (не подделка!). Все фрезы удовлетворяют стандартам качества. Если вы считаете, что уже перешли с этапа «начинающий», вам стоит обратить внимание на набор, представленный далее: в него включены аналогичные фрезы, но имеющие в 2 раза более высокое качество, отвечающие мировым стандартам качества заточки и твердых сплавов. Руководство по эксплуатации полностью русифицировано, отсутствуют технически заумные фразы и термины, все расписано подробно на уровне обычного пользователя.
Если вы считаете, что уже перешли с этапа «начинающий», вам стоит обратить внимание на набор, представленный далее: в него включены аналогичные фрезы, но имеющие в 2 раза более высокое качество, отвечающие мировым стандартам качества заточки и твердых сплавов. Руководство по эксплуатации полностью русифицировано, отсутствуют технически заумные фразы и термины, все расписано подробно на уровне обычного пользователя.
Перечень фрез, входящих в набор, приведен в следующей таблице.
Посредством данных фрез выполняются следующие работы:
— гравировка тонких надписей, узоров, клише
— обработка 3D рельефов, барельефов, форм
— вырезание по контуру, выравнивание поверхности
— работа с пластмассами, деревянными поверхностями, фанерой, ДВП, МДФ, шпоном и мягкими цветными металлами
ПРОФИ, $135
Набор из 13 фрез для продвинутых мастеров, понимающих толк в работе с помощью фирменного инструмента (см. рис. 2).
Рисунок 2
Назначение: Набор включает позиции, аналогичные набору «ХОББИ», при этом фрезы в комплекте — от лучших производителей. Набор предназначен не только для мастеров начального уровня, только что купивших или собравших первый станок, но и для людей, которые знают толк в работе с инструментом самого высокого качества. Набор укомплектован с помощью профессиональных мастеров, уже прошедших путь начинающего фрезеровщика, которые точно знают, что необходимо начинающему мастеру для постижения творческой работы. Комплект, кроме перечня фрез, включает описание каждой из фрез, ее назначение, скорость подачи, шпиндельные обороты, данные для ввода в программу и прочие важные моменты, которые следует учесть для продуктивной работы и предотвращения быстрого износа и поломки фрез. Комплект включает только фрезы с наилучшим качеством твердого сплава и заточки с помощью сверхточных ЧПУ-станков европейских производителей. Руководство по эксплуатации написано на русском языке, нет технически неясных фраз и терминов.
Набор предназначен не только для мастеров начального уровня, только что купивших или собравших первый станок, но и для людей, которые знают толк в работе с инструментом самого высокого качества. Набор укомплектован с помощью профессиональных мастеров, уже прошедших путь начинающего фрезеровщика, которые точно знают, что необходимо начинающему мастеру для постижения творческой работы. Комплект, кроме перечня фрез, включает описание каждой из фрез, ее назначение, скорость подачи, шпиндельные обороты, данные для ввода в программу и прочие важные моменты, которые следует учесть для продуктивной работы и предотвращения быстрого износа и поломки фрез. Комплект включает только фрезы с наилучшим качеством твердого сплава и заточки с помощью сверхточных ЧПУ-станков европейских производителей. Руководство по эксплуатации написано на русском языке, нет технически неясных фраз и терминов.
Посредством данных фрез можно выполнять следующие работы:
— граверные работы по созданию тонких надписей, узоров, клише
— создание 3D-рельефов, барельефов и форм
— вырезание по контуру, выравнивание поверхностей
— работы с пластмассой, деревом, фанерой, ДВП, МДФ, шпоном, цветными металлами, сталью.
Перечень фрез, входящих в набор, приведен в следующей таблице.
МОДЕЛИСТ, $45
Набор включает 9 фрез, предназначенных для работы увлеченных творчеством людей.
Комплект фрез для любителей заниматься творчеством, к примеру, моделированием самолетов, кораблей, созданием сувениров, различных подарков и пр. То есть «Моделист» — это набор для людей, получающих душевное удовольствие от подобной работы. Комплект разработан профессионалами, занимающимися моделированием и точно знающими, что вам потребуется для подобных кропотливых работ. В наборе содержится не только перечень фрез, но и подробное описание фрез, назначение каждой из них, скорости подачи, данные для программы, обороты шпинделя и прочие важные моменты, необходимые для продуктивной работы и предотвращения скорых поломок фрез. Данный комплект включает комбинацию недорогих качественных фрез китайского производства и специальных фрез высочайшего качества, поскольку не все необходимые фрезы для подобных работ производятся в Китае; зачастую уровень их качества невысок, что не дает возможности применять фрезы столь низкого класса при создании мелких точных элементов моделей. В наборе содержатся все необходимые важные фрезы от ведущих европейских производителей. При этом фрезы, для которых допустимо более низкое качество металла для создания модельной продукции (в целях снижения стоимости набора) в набор включены китайского производства. В данном наборе отсутствуют китайские фрезы низкого качества – только выпущенные в заводских условиях. Инструкция разработана на русском языке, отсутствует технически сложная информация.
В наборе содержатся все необходимые важные фрезы от ведущих европейских производителей. При этом фрезы, для которых допустимо более низкое качество металла для создания модельной продукции (в целях снижения стоимости набора) в набор включены китайского производства. В данном наборе отсутствуют китайские фрезы низкого качества – только выпущенные в заводских условиях. Инструкция разработана на русском языке, отсутствует технически сложная информация.
Перечень фрез, включенных в набор «Моделист», представлен в следующей таблице.
Посредством данных фрез выполняются следующие работы:
— гравировка тонких надписей, клише и узоров
— производство сверловки, окантовки, фаски, подрезки
— вырезание по контуру, выравнивание поверхностей
— работа с пластмассами, деревом, фанерой, ДВП, шпоном, акрилом, МДФ, оргстеклом, пенопластом
МЕТАЛИСТ, $190
В набор входят 13 основных твердосплавных фрез, предназначенных для профессиональной обработки металлов.
Набор создан для любителей работать с металлическими материалами. Комплект подобран специалистами, которые знакомы с данной работой и любят металл. Набор вам потребуется, если вы приняли решение связать свой следующий проект с обработкой металла. При этом важно сразу, начиная с первого дня, использовать только специальный качественный инструмент для работ по металлу, в противном случае вас может постигнуть разочарование. Набор включает не только перечень фрез, но и подробное их описание, а также назначение каждой фрезы, скорость подачи для каждого металла, обороты шпинделя, данные для ввода в программу, а также прочие важные моменты, которые следует учесть для получения отличных результатов при работе с металлом определенных марок и предотвращения поломки фрез. Данный набор включает только высококачественные фрезы из твердого сплава, имеющие высокое качество заточки на сверхточных станках с ЧПУ от европейских производителей. Рекомендации приведены на русском языке, нет технически неясных терминов.
Перечень фрез, включенных в данных набор, приведен в следующей таблице.
Посредством данных фрез можно:
— гравировать узоры и тонкие надписи, клише
— обрабатывать 3D-рельефы, формы, барельефы
— выполнять вырезание по контуру и выравнивание поверхности
— обрабатывать цветные металлы, стали, алюминий, дюраль, чугун, обычную сталь, нержавейку, каленую сталь до 65HRC, а также другие металлы мягче алюминия.
Твердосплавные конусные фрезы, граверы по металлу, пластику и дереву (кроме стекла и камня)
Спиральная фреза-гравер «TM TOPINCITY», $27
Изображение спиральной фрезы-гравера приведено на рисунке 3.Рисунок 3
Характеристики:
Производитель — Швейцария, твердый сплав SANDVIK Экстра-класса, оснащен ЧПУ-центровкой (см. рис. 4).
Рисунок 4
Оснащен ультратонким углом как гравер, нормировано-заточенным кончиком, диаметрами и углами, максимальной твердостью для твердосплавного инструмента, титановым покрытием, идеальной центровкой/балансировкой для работ без детонаций при повышенных оборотах шпинделя. Среди достоинств — максимально возможный срок эксплуатации для карбид-вольфрамовых фрез. Используется при создании объектов вращения и при глубоких фрезеровках вертикальных склонов заготовок; просто незаменима в ювелирном деле при работе с глубокими изделиями и формами из любого твердого вида воска (синего, зеленого, бордового и пр).
Среди достоинств — максимально возможный срок эксплуатации для карбид-вольфрамовых фрез. Используется при создании объектов вращения и при глубоких фрезеровках вертикальных склонов заготовок; просто незаменима в ювелирном деле при работе с глубокими изделиями и формами из любого твердого вида воска (синего, зеленого, бордового и пр).
Для работ по металлам необходимо изучить следующую таблицу от производителя.
Микро инструмент, $30
Характеристики:
Производитель — США, твердый сплав карбид вольфрама, ЧПУ-центровка, HRC65 (см. рис. 5).
Рисунок 5
Назначение: Микроинструмент, предназначенный для тончайших работ с восковыми моделями. Максимально тонкий кончик дает возможность проработки мельчайших надписей и узоров. Однако использование подобного инструмента требует предельной внимательности оператора и большого опыта работы с подобными фрезами и воском, поскольку неправильные обороты фрезы могут привести к оплавлению воска, в результате чего фреза залипает в воске. Также для установки данного инструмента важно наличие высококлассного шпинделя от надежного производителя. Стоит обратить внимание на шпиндельные подшипники, поскольку любой микролюфт, возникающий в результате изношенных подшипников шпинделя, приведет к повреждению кончика фрезы. В ходе обработки рельефов во избежание рисков необходимо сохранять остаток чернового слоя толщиной не более кончика микрофрезы.
Торцевые и радиусные, модель «TM TOPINCITY», $15
Характеристики:
Назначение: Фреза-гравер (см. рис. 6) для воска; используется при тонких гравировках по воску, пластику и мягким металлам.
Рисунок 6
Сплав фрезы высокого качества, однако для гравировки по металлу следует применять шире угол, чтобы избежать обламывания кончика гравера.
Модель «TM TOPINCITY», $11
Характеристики:
Является одной из наиболее популярных фрез (см. рис. 7), когда необходимо наличие маленького угла и фрезерующего торца. Фреза является основной для создания надписей.
Рисунок 7
Примечание: граверы по цене 6$; китайский сплав K15; второй жизнью южно-корейского инструмента является отрезание отработанной части 10 мм, потом остаток 30 мм затачивают в Тайване полуавтоматическим способом. На данный вариант ручной заточки нет гарантии высокого качества заточки, а также гарантии идеальной центровки. Твердость реза используемого сплава в 6$ не хуже HRC55.
Модель «TM TOPINCITY», $13
Характеристики: Предназначена для фрезерования ребром, когда 20-градусная фреза не способна выдержать нагрузок, а 30-градусная слишком велика.
Примечание: граверы по цене 6$; китайский сплав K15; второй жизнью южно-корейского инструмента является отрезание отработанной части 10 мм, потом остаток 30 мм затачивают в Тайване полуавтоматическим способом. На данный вариант ручной заточки нет гарантии высокого качества заточки, а также гарантии идеальной центровки. Твердость реза используемого сплава в 6$ не хуже HRC55.
Модель «TM TOPINCITY», $11
Характеристики:
Данная фреза (см. рис. 8) применяется в том случае, когда следует выделить контуры рельефа при минимальной фрезеровке торцом.
Рисунок 8
Используется для подрезки углов, при ювелирной гравировке тонких надписей, создании узоров на любых материалах.
$6
Характеристики:
Назначение: Фреза (см. рис. 9) применяется в случае, когда не выдерживают 20-ти и 30-ти градусные нагрузки – тогда используется 40 градусов.
Рисунок 9
45 — стандартное значение угла, которое традиционно применяется в различных проектах. Также можно добавлять углы к узорам и буквам вместо некрасивых острых ребер. Используется для подрезки углов, гравировки в ювелирном деле тонких узоров и надписей по различным материалам.
$6
Характеристики:
Назначение: Фреза 60 градусов (см. рис. 10) — вариант, который применяется, когда невозможно использовать 90 градусов фрезу ввиду близко находящихся узорных линий.
Рисунок 10
О 90-градусной фрезе можно сказать, что это общепринятый стандарт, предназначенный для конусных гравировок, в случае, если ведется работа по центральной линии с применением подрезки углов. Следует быть внимательным — отечественные фрезы по дереву не имеют острие 0,2 мм и правильно фрезерующий торец, что соответственно не даст высокого качества и правильной подрезки углов.
$6 (для стали)
Характеристики:
Гравер для гравировальных работ по стали. В отличие от стандартных твердосплавных граверов, имеет другие углы заточки торца и режущей грани. Подобные граверы можно применять в случаях слишком твердого материала, например, при работе со сплавами алюминия (разные марки дюралей), магнием, бронзой, твердыми латунными сплавами, различными сталями (кроме каленых и нержавеющих). Граверы для нержавеющих сталей (никеля), GFK, кевлара, каленой стали и граверы по обычной стали различаются: первые имеют наиболее дорогой сплав K55SF, дающий возможность выполнять работы даже по каленой стали, имеющей твердость до 68HRC.
Примечание: в подобных гравировках нужно выполнять обильное смачивание с помощью масел или CОЖ, применять наиболее широкий угол, вылет фрезы из цанги должен быть минимально возможным; станки использовать только жесткие для обработки металлов.
Не следует пытаться выполнять работу с применением хлипких любительских станков. В случае, если необходимы еще более мощные граверы по металлу, следует использовать двухсторонние конусные фрезы, оснащенные четырьмя ножами (см. раздел, посвященный фрезам специального назначения) или граверы KCT, «Пирамидка SANDVIK».
$7
Характеристики:
Производство: США, состав — карбид вольфрама, сабмикрогранула, центровка ЧПУ (см. рис. 11).
Рисунок 11
Назначение: Ведущий гравер-фреза, имеющий спиральную заточку. Оснащен идеальной балансировкой и центровкой для работ при повышенных оборотах с отсутствием биения (до 300 тыс. об/мин). Наличие двух спиральных ножей дает возможность подрезания стружки с выбросом вверх, при этом очищается от мусора гравируемый паз. Такая функция благоприятно влияет на продление срока эксплуатации гравера. Пазы полированные.
Рекомендован при работе с воском, пластиком, акрилом, древесиной, со всеми цветными металлами и сталью согласно формулам расчета по оборотам и шпинделя по таблице твердости металлов, приведенной выше, как для фрез диаметром 0,2 мм.
Примечание. В настоящее время модель KCT приобретает особую популярность в развитых странах, вытесняя граверы, оснащенные одним ножом. Данная модель является главным идеально сбалансированным инструментом для гравировальных работ по сувенирам, подаркам и прочих миниатюрным надписям.
«Пирамидка/сплав K15», Тайвань, $6
Модель TM TOPINCITY, «Пирамидка SANDVIK+титан», Швейцария, $15
Характеристики:
Назначение: Гравер (см. рис. 12) применяют в случае, когда требуется выполнять работы по гравировке тонких линий на твердых материалах – на сплавах нержавеющих сталей, чугуне, стали, бронзе, дюрали, прочих твердых и хрупких металлах, а также пластике, компаундах и композитах.
Рисунок 12
Не применяют данный гравер при гравировке тягучих металлов, тягучих пластмасс ввиду того, что гранями гравера будет «размазываться» мягкий материал по краю гравирующей линии, однако твердые либо хрупкие материалы будут иметь ровные края, без излишних наплывов. Чем более твердый обрабатываемый материал, тем шире нужно выбирать угол. При работе с наиболее твердыми материалами и для длительного срока службы следует использовать пирамидку из сплава SANDVIK экстра-класса, имеющую титановое покрытие и ЧПУ-центровку. Включает 4 ножа, 60 градусов. Sandvik служит при работе в критических нагрузках.
Примечание. Для более долгой службы пирамидки врезание в материал необходимо выполнять максимально под углом 20 градусов, а по возможности необходимо выставлять как можно меньшие углы врезания для входа пирамидки в материал боком. Если пирамидку опускать вертикально в материал, то износ кончика пирамидки возрастет.
Для того, чтобы избежать отламывания кончика, необходимо выполнять определенные рекомендации, приведенные в следующей таблице.
$6 (закругленные)
Характеристики:
Назначение: Данные граверы (см. рис 13) содержат не плоскость, а скругление на торце.
Рисунок 13
Подобные граверы служат для обработки микрорельефов с одновременной подрезкой края. Основным применением таких граверов является подготовка миниатюрных трехмерных литейных форм, работа с воском, модельным пластиком и мягкими металлами.
Граверы с хвостовиком, 6 мм, $8
Характеристики:
Назначение: Данные граверы (рис. 14) применяются при необходимости проработки широких расстояний между векторами или высоких боковых рельефных подрезок, при получении необходимых наклонов и пр.
Рисунок 14
Также подобные граверу будут удобны в случае применения боковой грани длинной заточки. Используются при работе с деревом, пластиками и мягкими металлами.
Примечание: в параметрах указывается величина полного угла. Если в программу вводится только одна сторона, следует делить полный угол напополам.
$25
Характеристики:
Назначение: Фреза-гравер (см. рис.15) оснащена одним конусным ножом, имеющим на конце сферическую заточку.
Рисунок 15
Подобная фреза применяется при обработке трехмерных рельефов с одновременной подрезкой рельефных краев. Также данной фрезой обрабатывают мягкие и твердые породы древесины, пластик, оргстекло, алюминий, акрил, медь.
Примечание: указанный в параметрах полный угол следует делить на 2 в случае внесения в программу только одной стороны.
$13 (алмаз без вращения)
Характеристики:
Гравер алмазный (см. рис.16) «одиночная точка». Служит для гравировальных работ – выполнения тончайших линий на любых материалах, как на мягких металлах и пластиках, так и на очень твердых сталях, каленых сталях, металлокерамике, каленом стекле и пр.
Рисунок 16
Для данного гравера не требуется вращения, таким образом при гравировке следует остановить вращение шпинделя. С помощью данного гравера можно писать наитончайшие буквы, выполнять микронадписи на любом материале, проводить различные линии по вектору. Можно проводить такие линии по стеклу, и затем надламывать стекло, как и при использовании обычного ручного стеклореза. Модели DR дают возможность гравировать более толстые линии большей глубины с усиленными нагрузками. Может использоваться при обработке материала на небольшой глубине с имитацией фрезеровки в нужных местах.
Рекомендации: Необходимо обеспечить четко горизонтальное положение заготовки для заглубления алмаза на одну глубину. При необходимости гравировки более твердых материалов выбирают шире угол во избежание излома кончика алмаза при усиленных боковых нагрузках. При необходимости фрезеровки на глубину необходимо использовать модели DR, поскольку они оснащены укороченным хвостовиком из нержавейки, имеют более твердый алмаз и способны выдержать максимальные боковые нагрузки. Наиболее тонкие линии гравировки получают посредством алмаза с углом 60 градусов, однако необходимо аккуратно осуществлять подачу боковой нагрузки, дабы не был обломлен кончик алмаза. Ширина гравируемой линии зависит от глубины, на которую гравер погружается в материал. Таким образом, для получения ширины линии 0,02 мм с помощью алмаза D-Point 60 следует опустить алмаз на 0,02 мм ниже поверхности, подлежащей гравировке, и аналогично для других алмазов. Можно также использовать резину и другие пружинящие подкладочные материалы для стабилизации давления на кончике алмаза. Алмазы более крупных размеров 0,5 и 1 карат (синтетические) имеют широкую гравировочную линию, однако служат гораздо дольше.
$65 (алмаз с вращением)
Характеристики:
Назначение: Гравер алмазный «четыре грани» (см. рис.17) служит для гравировки любых материалов: как мягких металлов, так и самых твердых сталей, каленых сталей, металлокерамических материалов, каленого стекла и пр.
Рисунок 17
Вращение данного гравера должен происходить со скоростью 3-6 тысяч об/мин. Его работа осуществляется аналогично фрезе «пирамидка», однако фрезеруется более толстая линия, нежели при использовании пирамидки или алмаза «одиночная точка». Можно делать надписи на любых материалах, а также рисовать различные линии по вектору либо проводить еще более широкие линии в ходе нескольких параллельных проходов.
В настоящее время алмаз является наиболее твердым материалом, но в работе с алмазным инструментом необходимо придерживаться определенных правил: нельзя ронять алмаз, так как он может расколоться; нельзя ударять его о заготовку, вбивать в заготовку; необходимо обеспечить ровное горизонтальное положение заготовки, подвергаемой гравировке, чтобы алмаз заглублялся в заготовку на одинаковую глубину.
$6 компрессионная резка
Характеристики:
Назначение: Фреза специальная компрессионная (см. рис. 18). Предназначена для резки тонколистовых материалов.
Рисунок 18
Направление верхних ножей — вниз, а нижних – вверх, что дает возможность выполнять резание тонкого пластика, цветных металлов, стали, избегая подрыва листа вверх и заусенец нижней и верхней части листа. Металл фрезы имеет определенный состав, позволяющий работать с любыми синтетическими пластиками и полимерами, с любыми цветными металлами, сплавами и сталью. При необходимости резки липкого алюминия, стали, меди и твердых сплавов рекомендуют подавать СОЖ.
ROLAND: граверы для станков с ЧПУ, длина 114 мм представлены на рисунке 19.
Рисунок 19
‘Fly Electric’ — DIY Motors
‘Fly Electric’ — DIY MotorsFly Electric!
В конце 2000 года Кристиан Лукас, Людвиг Ретцбах и Эмиль Куэрфус опубликовали в немецком журнале elektroModell проект самодельного бесщеточного двигателя. Хотя коммерческие бесколлекторные «бегуны» уже несколько лет были доступны в Европе (например, Actro), эти ребята продемонстрировали, как любой, у кого есть токарный станок, может сам изготавливать эти двигатели.Этот тип двигателя теперь известен как «LRK» по их названию.
С тех пор дела пошли вперед, и наступила революция «CD-Rom». Внезапно стало возможным ограбить ваш старый компьютер на запчасти для создания невероятно мощных двигателей, часто даже без токарного станка. Это поразило мое воображение. Благодаря усилиям GoBrushless.com новые компоненты стали доступны, и началось производство …
У меня есть несколько страниц на этом сайте, чтобы продемонстрировать эту технологию. На этой странице я перечисляю некоторые из моих наиболее успешных двигателей, а ниже вы можете найти ссылки на более конкретные страницы.Хотя двигатели CDRom довольно легко изготовить, расширение до более крупных размеров может быть довольно трудным из-за сложности обработки. Освоив их, я теперь могу построить любой размер, настроить их в соответствии с моделью и легко исправить, если они сломаются. Я получаю огромное удовольствие от полета на собственном моторе и не хотел бы сейчас повернуть назад. Дискуссионная группа LRK — хороший ресурс для получения более подробной информации.
* Двигатели CD-Rom (easy)
* Моторы Crocodile (высокий КПД)
* Советы по обработке (точная обработка)
* Плотность намотки (расширенный совет)
* Балансировка двигателей (расширенный совет)
* Фрезерный станок (самодельная фреза из сверла)
Двигатели «Крокодил»
«Проект крокодил» создал очень эффективные двигатели с использованием специального 40-миллиметрового статора.Моя первая имеет толщину 10 мм и весит 168 г (6 унций). Он превращает 11×7 при 7000 с 3 липо при 30A и на 40% эффективнее, чем Astro 15G. У моего второго статор 20 мм, он на 75% эффективнее Astro 40G и равен Actro 40-5 с винтом 16×8, вращающим 7000 об / мин при 1300 Вт. Подробнее читайте здесь.
| |
Мотор «Floppy Drive» 400 Вт
Это мой самый мощный мотор на сегодняшний день (хотя и не такой эффективный, как моторы ditto и croc).Он крутит винт 9×5 примерно при 10 000 об / мин. Он потребляет 35А от 3-х LiPoly. Он весит всего 138 г (4,9 унции). Это легче, чем слабый Speed 500 (153 г / 5,4 унции), и мощнее, чем Astro 15 с редуктором, который весит почти вдвое больше (248 г / 8,7 унции). Впечатленный?
| Готовый мотор | Большинство бит для моего первого двигателя дисковода для гибких дисков |
Двигатель «То же самое», 250 Вт
Довольно редко происходит насыщение железа в статоре, но это может случиться с гибкими статорами (из-за их большого диаметра и относительно длинных и тонких зубцов).Лучшим выбором для двигателей большего размера являются статоры приводов Iomega Ditto и другие «стримеры». У них часто бывает 18 довольно коротких зубцов, что делает двигатель очень крутящим. У некоторых есть 9 или 12 зубов. Вы можете купить их всего за 99 пенсов на ebay.
Ральф Окон — «мистер Дитто», и его сайт является выдающейся демонстрацией того, чего можно достичь. На данный момент я лучше всего использую эти статоры, это двигатель, который вращает 11×7 при 6700 об / мин и потребляет 26A от 3 Lipos. Он имеет тягу, аналогичную вышеуказанному двигателю, при 2/3 тока.Хороший!
Я использовал два 18 зубчатых статора (10×36,5 мм) и двадцать магнитов 3x5x10 мм. Я обнаружил, что магниты толщиной 3 мм потребляют на 13,5% меньше тока, чем магниты 2 мм, почти без потери частоты вращения.
| Мотор на Speedy Bee | Экспериментальная обмотка |
Двойной привод CD / «S400»
Он похож на серию Axi 2208.Он вращает APCe 8×6 примерно при 9000 об / мин при токе менее 9 А на 3-х LiPoly. Он идеально подходит для моего 36-дюймового Spitfire, поэтому я пока не стал его улучшать.
Два статора GB 22,7 мм образуют сердечник с 14 витками двух жил провода 0,375 мм, звезда. Умная деталь (не моя idea) — это банка, которая сделана из оболочки Speed 400. Ее намного проще создать, чем сделать колокол с нуля. Кроме того, она очень легкая, что требует меньше точности. Это, в свою очередь, работает более плавно и приводит к меньшему количеству балансировки / проблемы с резонансом, которые могут быть проблемой с роторами, изготовленными своими руками.
Я начал с 24 магнитов 1x5x5 мм в 12-полюсной конфигурации, но теперь использую 12 магнитов 1,2x5x10 мм. Это уменьшило воздушный зазор с 0,56 мм до 0,36 мм, и их легче установить. Я читал о людях, использующих магниты толщиной 1,5 мм, но я подумал, что воздушный зазор 0,15 мм будет менее приемлемым.
Несмотря на то, что банка на основе Speed 400 настолько проста в изготовлении, я был обеспокоен тем, что тонкая толщина стенки может отрицательно сказаться на эффективности. Из измерений с помощью самодельного датчика «эффекта Холла» было ясно, что через боковые стороны уходит значительный поток.Так что я сделал свой собственный колокол с более толстыми стенками. Я не могу провести прямое сравнение, потому что я использовал магниты толщиной 2 мм. Более высокий поток приводит к более низким оборотам в минуту, поэтому результат 8000, измеренный при 7А, не стал неожиданностью. Я ожидал, что если я оптимизирую обмотки для «правильного» колокола с 2-миллиметровыми магнитами, он будет работать лучше, чем более простая версия для банок Speed 400. Однако пока выигрывает простота конструкции последнего!
| Скорость 400 может мотор | Самодельный звонок с магнитами 2мм против банки Speed 400 |
Стандартный двигатель CD-Rom
Если есть такая вещь, как стандартный двигатель CDRom, то это единственный статор диаметром 22 мм, стандартный колокол, 12 магнитов 1x5x5 мм и 20 витков.Я использую статор GB 22,7 мм и 23 витка провода 0,45 мм, звезда. Он производит примерно такую же мощность, как и Speed 400 с редуктором, при 1/3 веса и почти вдвое меньшем. Неплохо! Взгляните на мою страницу двигателей CD-Rom для более подробной информации.
| «Пустой» сердечник плюс готовый двигатель | Как заводится |
Замена Speed 400 для быстрых моделей
Стандартный двигатель CDRom может иметь 6 полюсов вместо 12.В результате получается двигатель, который будет вращать небольшую пластиковую стойку Gunther (5×4,3) на более высоких оборотах, чем у хорошей Speed 400. Потребление статического тока может быть немного выше (13-14 А), но это приводит к большей скорости и более продолжительным полетам в быстрая модель. Я использую стандартные пакеты 8xAr800, которые я всегда использовал на 400-х. Помимо преимуществ в производительности и продолжительности, вес двигателя составляет треть. См. Мою страницу с двигателями для компакт-дисков для получения более подробной информации.
| Основные компоненты с парой тестовых банок | Некоторые варианты магнитов пробовали |
Дополнительная информация (те же ссылки, что и выше):
* Моторы CD-Rom (easy)
* Моторы Crocodile (высокий КПД)
* Советы по обработке (точная обработка)
* Плотность намотки (расширенный совет)
* Балансировка двигателей (расширенный совет)
* Фрезерный станок (своими руками фреза из сверла)
Начало страницы
Щелкните по ссылкам выше для получения дополнительной информации.
Щелкните по ссылкам ниже для перехода на другие страницы.
Домой
Искусство Возможного
Отсутствие материи
Ссылки
Обновления
Электронное письмо
КАРТА САЙТА
Что такое бесщеточные двигатели постоянного тока
Понимание принципа и применения высокоэффективных двигателей: 1 из 3
Двигатель преобразует подаваемую электрическую энергию в механическую. Обычно используются различные типы двигателей. Среди них бесщеточные двигатели постоянного тока (BLDC) отличаются высоким КПД и отличной управляемостью, и они широко используются во многих приложениях.Двигатель BLDC имеет преимущества в энергосбережении по сравнению с другими типами двигателей.
Двигатели силовые агрегаты
Когда инженеры сталкиваются с проблемой проектирования электрического оборудования для выполнения механических задач, они могут подумать о том, как электрические сигналы преобразуются в энергию. Таким образом, исполнительные механизмы и двигатели относятся к устройствам, преобразующим электрические сигналы в движение. Двигатели обменивают электрическую энергию на механическую.
Самый простой тип двигателя — щеточный двигатель постоянного тока.В этом типе двигателя электрический ток проходит через катушки, которые расположены в фиксированном магнитном поле. Ток создает магнитные поля в катушках; это заставляет узел катушки вращаться, поскольку каждая катушка отталкивается от аналогичного полюса и тянется к противоположному полюсу фиксированного поля. Чтобы поддерживать вращение, необходимо постоянно реверсировать ток — так, чтобы полярность катушки постоянно менялась, заставляя катушки продолжать «преследовать» разные фиксированные полюса. Питание катушек подается через неподвижные токопроводящие щетки, которые контактируют с вращающимся коммутатором; именно вращение коммутатора вызывает изменение направления тока в катушках.Коммутатор и щетки являются ключевыми компонентами, отличающими щеточный двигатель постоянного тока от других типов двигателей. На рисунке 1 показан общий принцип работы щеточного двигателя.
Рисунок 1: Работа щеточного двигателя постоянного тока.
Неподвижные щетки подают электроэнергию на вращающийся коммутатор. Когда коммутатор вращается, он постоянно меняет направление тока в катушках, меняя полярность катушек, так что катушки поддерживают правое вращение.Коммутатор вращается, потому что он прикреплен к ротору, на котором установлены катушки.
Общие типы двигателей
Двигателиразличаются по типу мощности (переменного или постоянного тока) и способу создания вращения (рисунок 2). Ниже мы кратко рассмотрим особенности и способы использования каждого типа.
Рисунок 2: Различные типы двигателей
Электродвигатели постоянного токас щеткой, отличающиеся простой конструкцией и легким управлением, широко используются для открывания и закрывания лотков для дисков.В автомобилях они часто используются для закрывания, выдвижения и установки боковых окон с электроприводом. Низкая стоимость этих двигателей делает их пригодными для множества применений. Однако одним из недостатков является то, что щетки и коммутаторы имеют тенденцию к относительно быстрому износу в результате их постоянного контакта, что требует частой замены и периодического обслуживания.
Шаговый двигатель приводится в действие импульсами; он поворачивается на определенный угол (шаг) с каждым импульсом. Поскольку вращение точно контролируется количеством полученных импульсов, эти двигатели широко используются для выполнения позиционных регулировок.Они часто используются, например, для управления подачей бумаги в факсимильных аппаратах и принтерах, поскольку эти устройства подают бумагу с фиксированными шагами, которые легко коррелируют с количеством импульсов. Паузу также можно легко контролировать, поскольку вращение двигателя мгновенно прекращается при прерывании импульсного сигнала.
У синхронных двигателей вращение синхронно с частотой питающего тока. Эти двигатели часто используются для привода вращающихся противней в микроволновых печах; редукторы в моторном блоке можно использовать для получения подходящей скорости вращения для нагрева пищи.Скорость вращения асинхронных двигателей также зависит от частоты; но движение не синхронное. В прошлом эти двигатели часто использовались в электрических вентиляторах и стиральных машинах.
Обычно используются различные типы двигателей. На этом занятии мы рассмотрим преимущества и применение бесщеточных двигателей постоянного тока.
Почему двигатели BLDC вращаются?
Как следует из названия, в бесщеточных двигателях постоянного тока щетки не используются. В щеточных двигателях щетки подают ток через коммутатор в катушки на роторе.Так как же бесщеточный двигатель передает ток на катушки ротора? Это не так — потому что катушки не расположены на роторе. Вместо этого ротор представляет собой постоянный магнит; Катушки не вращаются, а вместо этого фиксируются на статоре. Поскольку катушки не двигаются, нет необходимости в щетках и коммутаторе. (См. Рисунок 3.)
В щеточном двигателе вращение достигается за счет управления магнитными полями, создаваемыми катушками на роторе, в то время как магнитное поле, создаваемое неподвижными магнитами, остается фиксированным.Чтобы изменить скорость вращения, вы меняете напряжение на катушках. В двигателе BLDC вращается постоянный магнит; вращение достигается за счет изменения направления магнитных полей, создаваемых окружающими неподвижными катушками. Чтобы контролировать вращение, вы регулируете величину и направление тока в этих катушках.
Рисунок 3: Двигатель BLDC.
Поскольку ротор представляет собой постоянный магнит, ему не нужен ток, что устраняет необходимость в щетках и коммутаторе.Ток в неподвижных катушках контролируется извне.
Преимущества двигателей BLDC
Двигатель BLDC с тремя катушками на статоре будет иметь шесть электрических проводов (по два на каждую катушку), отходящих от этих катушек. В большинстве вариантов реализации три из этих проводов будут соединены внутри, а три оставшихся провода отходят от корпуса двигателя (в отличие от двух проводов, отходящих от щеточного двигателя, описанного ранее). Электропроводка в корпусе двигателя BLDC более сложна, чем простое соединение положительной и отрицательной клемм силового элемента; мы более подробно рассмотрим, как работают эти моторы, во второй части этой серии.В заключение мы рассмотрим преимущества двигателей BLDC.
Одним из больших преимуществ является эффективность, так как эти двигатели могут непрерывно управлять с максимальной силой вращения (крутящим моментом). Щеточные двигатели, напротив, достигают максимального крутящего момента только в определенных точках вращения. Для того, чтобы щеточный двигатель обеспечивал такой же крутящий момент, как и бесщеточная модель, необходимо использовать более крупные магниты. Вот почему даже небольшие двигатели BLDC могут обеспечивать значительную мощность.
Второе большое преимущество — связанное с первым — это управляемость.Двигателями BLDC можно управлять с помощью механизмов обратной связи, чтобы обеспечить точный требуемый крутящий момент и скорость вращения. Прецизионное управление, в свою очередь, снижает потребление энергии и тепловыделение, а в случаях, когда двигатели питаются от батареи, продлевает срок службы батареи.
ДвигателиBLDC также отличаются высокой прочностью и низким уровнем электрического шума благодаря отсутствию щеток. В щеточных двигателях щетки и коллектор изнашиваются в результате непрерывного движущегося контакта, а также вызывают искры в местах контакта.Электрический шум, в частности, является результатом сильных искр, которые имеют тенденцию возникать в областях, где щетки проходят через зазоры в коммутаторе. Вот почему двигатели BLDC часто считаются предпочтительными в приложениях, где важно избегать электрических шумов.
Идеальное применение для двигателей BLDC
Мы убедились, что двигатели BLDC обладают высокой эффективностью и управляемостью, а также имеют длительный срок службы. Так для чего они нужны? Благодаря своей эффективности и долговечности они широко используются в устройствах, которые работают непрерывно.Они давно используются в стиральных машинах, кондиционерах и другой бытовой электронике; а в последнее время они появляются в вентиляторах, где их высокая эффективность способствовала значительному снижению энергопотребления.
Они также используются для привода вакуумных машин. В одном случае изменение программы управления привело к значительному скачку скорости вращения — пример превосходной управляемости, обеспечиваемой этими двигателями.
ДвигателиBLDC также используются для вращения жестких дисков, где их надежность обеспечивает надежную работу приводов в течение длительного времени, а их энергоэффективность способствует снижению потребления энергии в той области, где это становится все более важным.
На пути к более широкому использованию в будущем
Мы можем ожидать, что в будущем двигатели BLDC будут использоваться в более широком диапазоне приложений. Например, они, вероятно, будут широко использоваться для управления сервисными роботами — небольшими роботами, которые предоставляют услуги не только в производстве, но и в других областях. Можно подумать, что шаговые двигатели больше подходят для этого типа приложений, где для точного управления позиционированием можно использовать импульсы. Но двигатели BLDC лучше подходят для управления силой.А с шаговым двигателем, чтобы удерживать такую конструкцию, как рука робота, потребуется относительно большой и непрерывный ток. Для двигателя BLDC все, что потребуется, — это ток, пропорциональный внешней силе, что обеспечивает более энергоэффективное управление. Двигатели BLDC могут также заменить простые щеточные двигатели постоянного тока в тележках для гольфа и мобильных тележках. Помимо большей эффективности, двигатели BLDC также могут обеспечивать более точное управление, что, в свою очередь, может еще больше продлить срок службы батарей.
ДвигателиBLDC также идеально подходят для дронов. Их способность обеспечивать точное управление делает их особенно подходящими для многороторных беспилотных летательных аппаратов, где положение беспилотника регулируется путем точного управления скоростью вращения каждого ротора.
На этом занятии мы увидели, как двигатели BLDC обеспечивают превосходную эффективность, управляемость и долговечность. Но тщательный и надлежащий контроль необходим для полного использования потенциала этих двигателей. На следующем занятии мы рассмотрим, как работают эти двигатели.
Список модулей
- Что такое бесщеточные двигатели постоянного тока
- Управление двигателями BLDC
- Решения Renesas для управления двигателями BLDC
Самодельная бесщеточная конструкция, напечатанная на 3D-принтере
Здесь мы собираемся построить самодельный бесщеточный двигатель. Сначала мы увидим, как работает бесщеточный двигатель, типы бесщеточных двигателей и, наконец, само здание. Этот двигатель напечатан на 3D-принтере, но есть много способов сделать самодельный бесколлекторный двигатель, если у вас нет 3D-принтера.
Бесщеточный двигатель
Бесщеточный электродвигатель постоянного тока (двигатели BLDC, двигатели BL), также известные как двигатели с электронной коммутацией (ECM, двигатели EC), представляют собой синхронные двигатели, которые питаются от источника постоянного тока через встроенный инвертор / импульсный источник питания, который вырабатывает электрический сигнал переменного тока для привода двигателя. В этом контексте переменный ток не подразумевает синусоидальную форму волны, а скорее двунаправленный ток без ограничений по форме волны.Дополнительные датчики и электроника контролируют выходную амплитуду и форму волны инвертора (и, следовательно, процент использования / эффективности шины постоянного тока) и частоту (то есть скорость ротора).
Роторная часть бесщеточного двигателя часто представляет собой синхронный двигатель с постоянными магнитами, но также может быть реактивным двигателем с переключаемым сопротивлением или асинхронным двигателем [необходима цитата].
Бесщеточные двигатели могут быть описаны как шаговые двигатели; однако термин «шаговый двигатель» обычно используется для двигателей, которые специально разработаны для работы в режиме, в котором они часто останавливаются, когда ротор находится в определенном угловом положении.На этой странице описаны более общие принципы работы бесщеточного двигателя, хотя они и частично совпадают.
Типы конструкции
Бесщеточные двигатели могут иметь несколько различных физических конфигураций: В «традиционной» (также известной как inrunner ) конфигурации постоянные магниты являются частью ротора. Ротор окружен тремя обмотками статора. В конфигурации с внешним ротором (или с внешним ротором) радиальное соотношение между катушками и магнитами обратное; Катушки статора образуют центр (сердечник) двигателя, в то время как постоянные магниты вращаются внутри выступающего ротора, который окружает сердечник.Плоский или осевой тип потока, используемый там, где есть ограничения по пространству или форме, использует пластины статора и ротора, установленные лицом к лицу. Outrunners обычно имеют больше полюсов, настроенных тройками для поддержания трех групп обмоток, и имеют более высокий крутящий момент на низких оборотах. Во всех бесщеточных двигателях катушки неподвижны.
Типы обмоток
CD-ROM [9N12P]
Где 9N — для 9 статоров, а 12P — для 12 полюсов. Это типичная обмотка, используемая в двигателях CD-ROM, обычно оканчивающаяся звездой (звезда).
Это первая схема намотки, с которой столкнутся многие производители и перемотчики двигателей. Это также самый простой способ намотки, так как все зубцы намотаны в одном направлении, то есть ABCABCABC.
dLRK [12N10P & 12N14P]
Вот наиболее распространенная схема обмотки из всех, так как она используется в большинстве моделей двигателей с выносными подножками, которые производятся в настоящее время.
Схема dLRK является производным от схемы обмотки LRK, которая помещает бесщеточные двигатели Outrunner на карту.
Соедините вместе: начало A — конец C, начало B — конец A, начало C — конец B.
dLRK Evolution [12N10P & 12N14P]
Вот интересная мутация схемы dLRK, без сомнения направленная на то, чтобы упростить и аккуратнее отключение обмоток. Это мой фаворит для моторов 12Н14П.
Обратите внимание, как начало и конец фаз, которые необходимо соединить вместе, выходят из одних и тех же слотов, что делает процесс завершения полностью надежным.
LRK [12N10P & 12N14P]
Именно здесь началась «бесщеточная революция». Схема обмотки LRK всегда будет помнить как «дедушку» бесщеточных двигателей Outrunner.
«LRK» — это аббревиатура, образованная от имен трех человек, которые популяризировали мотор-бегунок: Лукас, Ретцбах и Кюфус. В 2001 году они задокументировали использование этой схемы обмотки для двигателей моделей самолетов. А как говорят в классике, «остальное уже история».
Соедините вместе: начало A — конец C, начало B — конец A, начало C — конец B.
Построение самодельного 3D-печатного бесщеточного двигателя
Прежде всего вам необходимо загрузить 3D-файлы .stl и распечатать их. Вы можете скачать файлы по ссылке ниже.
Вы можете скачать 3д детали здесь:
Распечатайте две части, используя материал PLA, 4 периметра и 25 заполнителей. Как только вы получите свое тело, мы можем приступить к следующей части. Мы будем использовать неодимовые магниты круглой формы размером 10 на 3 мм.Чтобы узнать, какой полюс каждого магнита, мы ставим их один к другому из стороны в сторону. Если магнит хочет вращаться, это означает, что грани одного полюса, а мы этого не хотим. Мы хотим иметь один северный полюс, затем один южный, затем другой северный и т. Д.
>Как только у вас будет 14 магнитов в ряд, начните и пометьте каждый магнит буквами N и S. Неважно, какой из них южный, а какой северный, важно, чтобы один был противоположен следующему. Теперь мы можем начать размещать эти магниты внутри печатной части.
>Теперь мы возьмем внутреннюю часть и добавим одну биту 10х4 мм на нижней стороне и одну на верхнюю часть. В качестве вала мы используем винт M5 длиной 5 см.
>Наконец, мы добавляем 12 винтов M3 длиной 18 мм в каждое отверстие и склеиваем их.
>Теперь нам нужно сделать обмотки для нашего мотора. Мы будем использовать тип обмотки dLRK для этого 12-полюсного 14-магнитного бесщеточного двигателя. Следуйте следующей схеме, чтобы намотать катушки.
>Не забудьте пометить начало каждого провода с помощью Ain, Bin, Cin, а в конце — с помощью Aout, Bout и Cout, чтобы не перепутать их.Просто приклейте к проводу небольшую этикетку. Мы сделаем катушки по 60 витков с медным проводом 0,2 мм. Как только обмотка будет завершена, припаяйте вместе Ain с Cout, Bin с Cin и Aout с Bout. Теперь просто закройте мотор и завинтите его, и мы готовы к работе. Подключите 3 клеммы к ESC и проверьте его. Вы всегда можете изменить настройки для получения лучших результатов. Измените количество витков обмотки, расстояние от полюса до магнита, размер и т. Д.
См. Другие руководства:
Создайте свой собственный электродвигатель
Цена: $ 19 | ||
Вы можете скачать электронную книгу, как только совершите покупку. |
Это практическое руководство, которое шаг за шагом описывает, как построить мощный электродвигатель способ «Сделай сам». Весь процесс строительства покрыт деталь с фотографиями, документирующими каждый шаг на пути.
Двигатель, изготовленный в соответствии с данными инструкциями. весит около 10 кг. Наружный диаметр 366 мм, а ширина около 120 мм, выходной вал и резьбовые монтажные стержни / болты в комплект не входят.Максимальная потребляемая мощность еще не определена. Двигатель, встроенный в эту книгу, непрерывно развивает мощность 7 кВт. импульсами до 18 кВт без видимых повреждений.
Двигатель может использоваться для приведения в движение легкого мотоцикла, меньшая лодка, сверхлегкий самолет и много других интересных творений. Двигатель — бесщеточный двухсторонний осевой. магнитный поток постоянный магнит 3-фазный переменный ток с воздушным сердечником воздух охлаждаемый датчик Холла, подключенный по схеме «треугольник». Уникальной особенностью этого двигателя является то, что он может быть построен в версии с раздельным статором без датчика, с питанием от 7 хобби ESC.Эта версия с разъемным статором может: в некоторых приложениях быть экономически привлекательным альтернатива версии с датчиком Холла, которая обычно питается от более дорогого датчика Холла зависимый контроллер.
Содержание
Часть 1: Общая информация об электродвигателях с осевым потоком, сделанных своими руками
Общая информация и внешние границы
Характеристики двигателя с осевым потоком с воздушным сердечником
Два разных способа определения положения ротора
Информация о разделенном статоре
Мощность и КПД
Электромагнитные катушки и инструменты для намотки катушек
Постоянные магниты
Структура статора
Структура ротора
Часть 2: Пошаговые инструкции по сборке
Покомпонентное изображение с названными частями
Изготовление инструмента для намотки катушки
Расчет длины медных проводов
Катушечная обмотка
Создание статора и статора инструмент для ламинирования
Сборка роторов
Сборка и испытание двигателя
Часть 3: Разное
Список материалов и требований к инструментам
Где купить материалы в Интернете
Вдохновляющие фотографии
Технические чертежи
Заглянуть в книгу
Вдохновляющие фото и видео
Конструкция двигателя, задокументированная в книге, привела к созданию двигателя, который используется в преобразовании электрического мотоцикла.
В первой части видео вы можете увидеть положение постоянных магнитов в сравнении с катушками электромагнита. Вторая половина фильма раскрывает некоторые проблемы, с которыми вы столкнетесь, если решите провести динамический тест с пропеллером и в то же время захотите задокументировать тест с помощью видеокамеры.
Экспериментальная бессенсорная версия электродвигателя.В этом ролике он питается от 7x HobbyCity super simple 100A 24V ESC.
В этом видео показана значительно более мощная версия мотора для кик-байков, около 500 Вт.
Если вас интересует сборка этого мотора, вы можете купить неотредактированную пошаговую инструкцию по сборке.
Простой однофазный бесщеточный двигатель.
Смотрите другие видеоролики об электродвигателях, сделанных своими руками, на нашем канале YouTube.
Дальнейшие разработки / испытания
Тест максимальной мощности с 11 элементами Thundersky 90Ah.
Настройке ESC 7x120A требуется помощь в определении направления вращения, поэтому добавляются пусковой двигатель и звездочка свободного хода.Пусковой двигатель управляется левой ручкой дроссельной заслонки и регулирует скорость до 5-6 км / ч. Правую ручку дроссельной заслонки, которая управляет ESC 7x120A, можно использовать на скоростях выше 3-4 км / ч.
Экспериментальный двигатель высокой эффективности и большой мощности. 840 параллельных прядей 0,05 мм по 3,9 м каждая. Намотать катушки было немного сложно, фотографии в видео подсказывают, как это сделать. Сопротивление фазы 3,5 мОм.Контроллер Келли на левой ручке дроссельной заслонки (датчик Холла) и 6x 180 A пик Hobbywing ПДУ ESC на правой рукоятке дроссельной заслонки (потенциометр Magura 5 кОм). Контроллер Келли действует как стартер.
Новый статор с воздушным сердечником, улучшенное охлаждение.
Ссылки по теме
Конструкция двигателя, задокументированная в книге, привела к созданию двигателя, который используется в преобразовании электрического мотоцикла.Для получения дополнительной информации: http://www.evalbum.com/3318.
Часто задаваемые вопросы
Вопрос:
Обожаю вашу работу! Это очень вдохновляет. У меня есть один вопрос по теории мотора. Так как вы не используете матрицу Хальбаха, выиграет ли ваш двигатель от стальной задней пластины для магнитов, замыкающих магнитную цепь? Или, может быть, вы используете стальную заднюю пластину? Как вы думаете, насколько сильное поле между щелями вы можете получить со стальными задними пластинами? Заранее спасибо!
Ответ:
Стальная задняя пластина снижает число оборотов / об / мин для данной версии двигателя примерно на 20%, что позволяет создать еще более эффективный двигатель; это все в книге!
Вопрос:
Меня очень интересуют ваши планы по изготовлению двигателя с осевым потоком, однако я хотел бы построить двигатель, который мог бы выдерживать 20 кВт.Делает ли это ваш продвинутый дизайн, проиллюстрированный в ваших новых разработках?
Ответ:
Я не испытывал систематически двигатель в лаборатории, а скорее в реальных условиях, а именно в качестве тягового двигателя в преобразовании электрического мотоцикла. В этом приложении двигатель выдерживает импульсную мощность 20 кВт примерно при 1500 об / мин. Я не ожидал, что двигатель будет выдерживать 20 кВт на низких оборотах в течение более длительного периода времени. Однако работа двигателя на более высоких оборотах позволит передавать больше мощности через двигатель без его перегрева.Это может быть достигнуто разными способами, либо за счет установки более высокого напряжения, либо путем намотки катушек в сторону более высоких оборотов в минуту / об. Также, конечно, есть возможность увеличить мотор.
Вопрос:
Хорошо, это потрясающе. У меня есть мельница, но нет токарного станка. Требуется токарный станок?
Ответ:
Нет, в этой сборке токарный станок не нужен.
Есть две детали сборки, которые можно изготовить на токарном станке, но это не обязательно для достижения хорошего конечного результата.
Вопрос:
Я заинтересован в создании собственного электродвигателя для своего электромобиля. Однако у меня есть определенные параметры двигателя (крутящий момент и частота вращения), которых мне нужно достичь. Как правило, для этого применения требуется низкооборотный двигатель с высоким крутящим моментом. Содержит ли ваша книга необходимую информацию для определения обмоток катушки на основе заданных характеристик двигателя (Kt и Kv)? Хорошая работа между прочим ……
Ответ:
В этой книге вы найдете приблизительный способ расчета правильной длины медного провода / катушки, для которой требуется определенное число оборотов в минуту / Вольт.В целом книга представляет собой практическую инструкцию по сборке и не охватывает основную математику. Однако в процессе создания электродвигателей я приобрел большой практический опыт, который я постарался изложить в письменном виде.
Говоря об опыте, двигатель с осевым потоком воздуха с воздушным сердечником без надлежащей передачи не был бы моим первым выбором для двигателя с низким крутящим моментом и высоким крутящим моментом.
| Как сделать бесщеточный двигатель своими руками Автор: victorigwe: 18:23 Вон 5 июня , 2017 |
Привет! Я расскажу вам, как сделать собственный бесщеточный двигатель своими руками, это просто, вы видите здесь, в Нигерии, бесщеточный двигатель стоит 4600 найр, и я хочу сделать вертолет или квадрокоптер на радиоуправлении даже самолетом, и вам нужна регулировка за ваши деньги, здесь — выход из положения, создание любого кв.в. самостоятельно, следуя инструкциям или шагам, которые вы узнаете, как сделать это самостоятельно. |
| Re: How to Make Diy Brushless Motor by victorigwe: 18:39 pm 05 июня , 2017 |
Я получил этот двигатель из магазина vedio, беспомощно лежащий на группу, я открываю ее и снимаю в ней цепь, вот amiture 24, но он был плоским, я снимаю с него катушку. |
| Re: How To Make Diy Brushless Motor by victorigwe: 18:50 pm On Jun 05 , 2017 |
step 1 romov катушка |
| Re: Как сделать бесщеточный двигатель своими руками от victorigwe: 22:04 5 июня , 2017 |
шаг 3: намотка возьмите толстую медную проволоку и сверните ее так, как показано на изображении. |
| Re: Как сделать бесщеточный двигатель своими руками по victorigwe: 22:15 5 июня , 2017 |
мой поворот 47 рассчитать мебель.Примечание |
| Re: Как сделать бесщеточный двигатель своими руками по victorigwe: 10:23 вечера 5 июня , 2017 |
шаг 4: припаять провод 1 Поделиться |
| Re: How to Make Diy Brushless Motor by victorigwe: 22:29 pm На июн 05 , 2017 |
шаг 5; Держатель стойки |
| Re: How to Make Diy Brushless Motor by victorigwe: 22:34 pm 5 июня , 2017 |
шаг 7: установите его |
| Re: How to Make Diy Brushless Motor by victorigwe: 10:41 pm On Jun 05 , 2017 |
шаг 8: приклейте обратно бесщеточный Заменяю вал на длинный, обратно приклеиваю резинкой Eposy. |
| Re: How to Make Diy Brushless Motor by victorigwe: 22:44 pm 05 июня , 2017 |
шаг 9 накройте его и добавьте что-нибудь на конце вала, а не падать при вращении. |
| Re: Как сделать бесщеточный двигатель своими руками, автор: victorigwe: 10:48 вечера 05 июня , 2017 |
, шаг 10, убедитесь, что корпус не задевает корпус. Вы готовы пойти. |
| Re: How to Make Diy Brushless Motor by victorigwe: 10:58 pm 05 июня , 2017 |
step 11 test |
| Re: Как сделать бесщеточный двигатель своими руками от victorigwe: 11:11 pm On Jun 05 , 2017 |
ViDEOs |
Бесщеточный двигатель с компакт-диска или жесткого диска в качестве моделирующего двигателя
Идея заключалась в создании любительского бесщеточного двигателя для хобби.
Бесщеточный двигатель
Бесщеточный двигатель для Piccolo от Hennig. ССЫЛКА НА САЙТ.
Это движок снятый с дисковода ASUS CDROM (1999 г.). Это мотор дисковода. Такие моторы имеют ось диаметром 3 мм. Следует использовать двигатели от приводов 36x не старше 1999 года. Двигатель недостаточно силен, поэтому его нужно немного доработать.
9-полюсный статор с обмотками и направлением обмотки. Вы должны удалить старые обмотки, затем намотать новые.Это будут три обмотки по 16 витков медной проволоки верхнего валика в эмали диаметром 0,4 мм. На рисунке показано, как наматывать обмотку. Обратите внимание, что все обмотки намотаны в одном направлении и одинаково.
Вид перемотанного двигателя ASUSx40 по частям.
Слева:
- ротор с 12 полевым магнитом Статор
- с новыми обмотками
- ручка с подшипниками скольжения и двумя отверстиями с резьбой M3
- подшипник шариковый 2мм / 5мм
- под осью 3 мм / 2 мм
Вот сравнение описываемого двигателя с оригинальным для Piccolo Ikarus G-310. Оба двигателя имеют одинаковую мощность (КПД). Явно разные габариты.
Вес Asus CDR-40x: 18 г
Ikarus G-310: 49 г
Двигатель установлен на Piccolo. Будьте осторожны с кабелями. Вращающиеся части двигателя открыты. Используемый регулятор — ДЖЭТИ 06-3П.
Вот движок аналогичной конструкции от привода CDROMx36. Будьте осторожны с изоляцией статора, она очень тонкая и нежная.Лучше было бы заменить его другим, например бумажным в намотанных конденсаторах.
В данном случае было намотано три обмотки проводом ДНЭ 0,4мм по 14 витков в каждой. Двигатель привык к тихоходу.
Такой же установленный двигатель.
Еще один способ получить материалы для сборки собственного бесщеточного двигателя — разобрать старый жесткий диск компьютера. Диск может быть поврежден, важен только приводной двигатель пластин. Подойдут двигатели от дисков 3,5 ”или 2,5” объемом не менее 200МБ.Важна не мощность, а сам двигатель. В более старых приводах (20, 40, 80, МБ) использовались двигатели с 4 или 6 парами полюсов. Для наших целей нам понадобится двигатель с 9 или 12 парами полюсов. Еще один критерий выбора — это вес двигателя.
Разберите жесткий диск, чтобы снять двигатель. Для этого откручиваем обшивку и головки. ПРИМЕЧАНИЕ: магнит в двигателе привода головок очень сильный. Отдых для наших целей бесполезен. Единственное, что когда-либо было полезно, — это подшипники, на которых установлен рычаг головки.
Это следует делать осторожно, чтобы не повредить седло подшипника и не поморщить ось. На этой картинке есть привод 2,5 ”, но он выглядит как 3,5”. К сожалению, на 2,5-дюймовых дисках посадочное место подшипника также является корпусом диска. Так что вырежьте из туловища нужную форму, которая придаст креплению.
На этом фото двигатель с диском 3,5 ”. Он больше по размеру и имеет отдельный корпус нижнего подшипника.
Такой же двигатель в разобранном виде.
Чтобы выбить ось из подшипника, возьмите твердый молоток или рант. Ось с подшипником должна быть нагрета примерно до 150 градусов Цельсия, потому что она заделана клеем. Без него подшипник, статор или ось были бы разрушены. Затем разверните старые обмотки и перемотайте новые. Для этого используйте провод ДНЭ 0,4-0,5. Намотайте 14-16 витков, запоминая то же направление и порядок наматывания катушек.
Ссылка на оригинальную ветку (полезное приложение) — Silnik bezszczotkowy z CD-ROM lub HDD jako silnik modelarski
Как работает бесщеточный электродвигатель?
В статье «Как работают электродвигатели» объясняется, как работают щеточные электродвигатели .В типичном двигателе постоянного тока есть постоянные магниты снаружи и вращающийся якорь внутри. Постоянные магниты неподвижны, поэтому они называются статором . Якорь вращается, поэтому его называют ротором .
Якорь содержит электромагнит . Когда вы пропускаете электричество в этот электромагнит, он создает магнитное поле в якоре, которое притягивает и отталкивает магниты в статоре. Таким образом, якорь вращается на 180 градусов.Чтобы он продолжал вращаться, вам нужно поменять полюса электромагнита. Щетки справляются с этим изменением полярности. Они входят в контакт с двумя вращающимися электродами, прикрепленными к якорю, и меняют магнитную полярность электромагнита во время его вращения.
Эта установка работает, проста и дешева в изготовлении, но имеет много проблем:
- Щетки со временем изнашиваются.
- Поскольку щетки замыкают / разрывают соединения, возникают искры и электрический шум.
- Щетки ограничивают максимальную скорость двигателя.
- Электромагнит в центре двигателя затрудняет охлаждение.
- Использование щеток ограничивает количество полюсов якоря.
С появлением дешевых компьютеров и силовых транзисторов стало возможным «вывернуть двигатель наизнанку» и избавиться от щеток. В бесщеточном двигателе постоянного тока (BLDC) вы помещаете постоянные магниты на ротор и перемещаете электромагниты к статору. Затем вы используете компьютер (подключенный к мощным транзисторам) для зарядки электромагнитов при вращении вала.Эта система имеет множество преимуществ:
- Поскольку компьютер управляет двигателем, а не механическими щетками, он более точен. Компьютер также может включить в уравнение скорость двигателя.