Как сделать квадрокоптер
Мастер-самодельщик давно увлекается авиамоделями. Сначала это были модели самолетов, затем квадрокоптеры. В этой статье мастер расскажет какие материалы лучше выбрать для квадрокоптера, а также как сделать раму из фанеры. Давайте посмотрим небольшое демонстрационное видео.
Для изготовления квадрокоптера мастер использовал следующие
Инструменты и материалы:
-Березовая фанера;
-Контроллер Omnibus F4, SP Racing F3;
-Распределительный щит питания Mateck;
-Контроллер HGLRC 28A BLHeli ESC — 4 шт;
-Мотор Racestar BR2204 2600Kv Racing Edition -4 шт;
-Пропеллеры KingKong 5X4X3 — 4 шт;
-Радиомодуль Flsky TH9X с приемником;
-Аккумулятор Gens 3800 мАч;
-Стойки; — 16 шт;
-Винты M3;
-Паяльные принадлежности;
-Нож;
-ЧПУ-резак;
Шаг первый: выбор материала
Рамка.
Обычно рамка изготавливается из легких и жестких компонентов, таких как стекловолокно, углеродное волокно, дерево, алюминий и т. д. Существует множество различных типов рам, мастер будет делать рамку под четыре двигателя.
Такие рамки бывают в основном в Н-форме или Х-форме. X-форма является хорошим балансом между стабильностью и маневренностью. Именно такую рамку и будет делать мастер.
Контроллер.
Контроллер управляет работой двигателей. На диаграмме видно, что все двигатели вращаются в противоположных направлениях, чтобы нейтрализовать крутящий момент, создаваемый каждым двигателем. Контроллер является мозгом квадрокоптера, это в основном небольшой компьютер, который использует свои датчики для постоянного измерения угла и скорости.
Контроллеры полета классифицируются в основном по спецификации процессора.
Двигатели.
Есть два типа двигателей, коллекторные моторы и бесколлекторные моторы. В большинстве квадрокоптеров используются бесколлекторные двигатели, которые могут очень быстро реагировать на изменения в оборотах и требованиях к крутящему моменту. Для работы бесщеточных двигателей необходим специальный электронный регулятор скорости (ESC). Размер бесколлекторных двигателей обозначается 4-значным числом — AABB. «AA» — ширина статора, а «BB» — высота статора или диаметр статора, оба в мм (миллиметрах). Например, Racestar BR2205 имеет статор диаметром около 22 мм и высотой около 05 мм.
По сути, чем выше статор, тем больше мощность при более высоких оборотах, и чем шире статор, тем больше крутящий момент при более низких оборотах.
Значение KV двигателя указывает скорость, с которой двигатель будет вращаться, когда вы подаете 1 вольт на его обмотки. Он определяется количеством обмоток медного провода в статоре двигателя и магнитной силой магнитов.
Меньшее количество обмоток означает меньшее сопротивление, и, соответственно, более высокие обороты. Вот почему двигатели с более высоким KV, как правило, имеют меньшую обмотку статора.
KV определяет, какой винт вы можете использовать с двигателем. Чем ниже KV, тем больший винт он может вращать, и наоборот. Нельзя увеличить подъемную силу, установив больший винт на двигатель с более высоким KV, так как требования к крутящему моменту будут выходить за пределы допустимой мощности и двигатель будет перегреваться.
Например: двигатели BR2205 2600 кВ могут работать с 5х4 дюймовыми винтами, а двигатели BR2212 1000 кВ могут работать с винтами 10х4,5 дюйма
KV ни в коем случае не является показателем выходной мощности двигателя, двигатели с более высоким KV не обязательно более мощные, чем двигатели с более низким KV.
Электронные регуляторы скорости (ESC).
Последние достижения в области мини-квадракоптеров стали возможны благодаря появлению небольших электронных регуляторов скорости, которые позволяют работать бесколекторным двигателям. Работа электронных контроллеров скорости заключается в получении сигнала дроссельной заслонки от контроллера полета и поддержании вращения двигателя на требуемой скорости. Внутри этих небольших устройств работает целый ряд технологий, которые выходят за рамки этой инструкции. При покупке выбирайте ESC с номинальным постоянным током как минимум на 20% больше расчетной.


Пропеллеры.
Пропеллеры преобразуют механическую энергию двигателей в тягу. Размер и форма пропеллера играют огромную роль в эффективности полета.
Есть 2 типа форматов, которые используют производители: L x P x B | LLPP x B. Где, L — длина, P — шаг, B — количество лопастей.
Пропеллеры могут быть изготовлены из различных материалов, таких как пластиковый композит, углеродное волокно, дерево и т. Д. Каждый тип материала обладает уникальными характеристиками, например, углеродное волокно и дерево действительно жесткие и известны своей плавной работой, а некоторые пластики чрезвычайно долговечны. Большинство винтов, используемых в мини-квадрокоптерах, сделаны из пластиковых композитов.
Размер пропеллера, который вы можете использовать, ограничен размером вашей рамы, а также мощностью КВ вашего двигателя. Как правило, чем больше пропеллера вы можете использовать для создания определенной тяги, тем эффективнее он будет. Для мини-квадрокоптеров они варьируются между 5-6 дюймовыми винтами с шагом 4-5 дюймов.
Количество лопастей влияет на тягу и расход энергии. Чем больше лопастей, тем больше тяга и тем больше тратится энергии.
Батареи.
В настоящее время большинство беспилотных летательных аппаратов используют литий-полимерные батареи, обычно известные как батареи Lipo. Аккумулятор вместе с ESC и двигателем — это система питания квадрокоптера.
Не думайте о батарее как о резервуаре энергии, двигатели могут тянуть чудовищное количество ампер в очень короткие промежутки времени. LiPo батареи представляют собой набор ячеек, каждая из которых имеет номинальное напряжение 3.7 В. Если требуется более высокое напряжение, эти элементы могут быть соединены последовательно, чтобы сформировать одну батарею. Батареи соединенные последовательно обозначены буквой «S», а параллельно — буквой «P».
Чем больше ячеек соединены последовательно, тем выше напряжение и чем больше ячеек параллельно, тем выше емкость.
Например:
1S = 1 ячейка = 3,7 В
2S = 2 ячейки = 7,4 В
3S = 3 ячейки = 11,1 В
4S = 4 ячейки = 14,8 В
5S = 5 ячеек = 18,5 В
6S = 6 ячеек = 22,2 В
Емкость обозначается в миллиамперах или «мАч» . Это количество ампер, которое батарея может подать за один час. Например, батарея 3S 2000 мАч может обеспечить 2 А в течение 1 часа. так что, если ваш квадрокоптер тянет 20А, то его полет будет продолжаться в течение 2/20 * 60мин = 6 минут.
Номинальная разрядка обозначает максимальную скорость, с которой вы можете вытягивать ток из батареи. Он обозначается цифрой «С» сверху. Чем выше рейтинг С, тем большее количество тока может дать батарея.
Например, аккумулятор 2000 мАч 25C может выдавать до 2000×25 = 50000 мА или 50 А.
Шаг второй: проектирование и сборка каркаса
Дизайн рамы был вдохновлен формой бабочки-монархом. Когда вы смотрите на раму сверху, она выглядит как два крыла.
Мастер нарисовал дизайн в Fusion 360 и Rhino CAD. Размер рамы составляет около 230 мм, он обусловлен диагональным расстоянием от одной ступицы двигателя до другой. Самые популярные размеры рамы составляют 210 мм, 250 мм и т. д. Как только вы установили размер рамы, нарисуйте крепления для двигателя.
Центральный корпус — это место, где будет установлена вся электроника, включая контроллер полета, приемник, батарею и т. Д. В средней точке есть 4 отверстия M3 на расстоянии 30,5 мм друг от друга.
Деталь выполнена с помощью лазерной резки. Если у вас нет резака, то можно сделать резку в мастерской. Файл для резки можно скачать ниже.
Дизайн файлов.rar
Шаг третий: сборка
Теперь нужно собрать квадрокоптер.
Сначала нужно прошить контроллер прошивкой Betaflight. Затем выполнить калибровку датчика. Подключите радиомодуль и проверить его работу. Закрепить двигатели на раме в соответствии с диаграммой X-образной рамы с правильным направлением вращения. Припаять выводы двигателя к контактам ESC и закрепить ESC на кронштейне. Закрепите плату распределения питания и припаяйте контактные площадки ESC. Подключить Soler XT60 к кабелю питания, а затем к плате распределения питания. Закрепите контроллер. Подключить провода от ESC к контроллеру полета. Закрепите приемник на раме. Наденьте верхнюю крышку.
Источник
Получайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.Квадрокоптер своими руками из подручных материалов. — Паркфлаер
Всем доброго времени суток! Хочу вам рассказать о том, как я строил свой первый квадрокоптер, в каком он сейчас состоянии и мои дальнейшие планы на него.Сначала, подобрав размер квадра, приступил к зарисовке чертежа на куске обоев.
Кстати, размер выбрал 45 — универсальный, так как это мой первый дрон, и в каком направлении буду развиваться пока не знаю.
Собрав дома весь стеклотекстолит, приступил к выпиливанию двух одинаковых основ, между которыми будут зажаты лучи.
Материалом для изготовления лучей послужил алюминиевий квадратный профиль 10*10мм
Предварительная версия…
Крепил лучи между основами с помощью винтов и гаек, ничего другого не придумал)
Идём далее…
Ноги, шасси делал также из стеклотекстолита. Нарисовав эскиз, приступил к нарезке заготовок
После чего приступил к мучению шуруповёрта
Несмотря ни на что, дрон всё-таки встал на свои ноги)
А теперь — взвешивание. Вес рамы, без какого-либо оборудования, составил 263 грамма. Я думаю что это достаточно приемлемый вес, а что думаете вы?
Теперь, когда рама собрана, можно приступить к установке комплектующих.
Моторы и регули я выбрал эти:
EMAX XA2212 820KV 980KV 1400KV Motor With Simonk 20A ESC
Товар http://www.parkflyer.ru/ru/product/1669970/
Мозг, всем известный cc3d
Товар http://www.parkflyer.ru/ru/product/1531419/ Батарея:
Аккумулятор литий-полимерный ZIPPY Flightmax 3000mAh 3S1P 20C
Товар http://www.parkflyer.ru/ru/product/8851/
Моторы со штатными крестиками крепил к лучам на болты и гайки
Моторы установлены. Регуляторы примотал на изоленту, радиаторами к лучам.
Затем плату распределения питания разместил между пластинами стеклотекстолита
Припаял все нужные провода (регуляторов, габаритных огней).
Перфекционистам не смотреть)))
Проверил работоспособность…
Установив плату распределения питания, приступил к монтажу мозгов. Банально прилепил их на 2-х сторонний скотч.
Также поступил с приемником
Крепление батареи осуществляется благодаря липучкам на нижней основе квадра.
Вот и всё! Полётный вес квадрокоптера — 993 грамма. Прошив полётный контроллер, пошёл на улицу на первые испытания.
Видео полётов смотрите с 2.50 минуты
Квадрокоптер был построен в конце лета 2016, сейчас начало 2017г. За этот период квадрокоптер побывал в небе достаточное количество времени. В данный момент коптер цел, не было ни одного краша, я его немножко модернизировал, для установки камеры на его борт. В дальнейшем хочу на нём научится летать по fpv. Сейчас потихоньку начинаю собирать Fpv систему, видеопередатчик, приёмник уже заказал))
Спасибо всем кто читал выше изложенное, если есть вопросы, советы, пожелания — пишите в комментариях. Ниже представлены фотографии сделанные камерой, установленной на квадрокоптере, ну и сам коптер.
С Ув. Алексей
15.01.17
Как сделать микро квадрокоптер своими руками


Всем доброго времени суток дорогие друзья! В сегодняшней статье я бы вам хотел показать довольно интересную самоделку, а именно самодельный квадрокоптер. Если вам нравиться авиамоделизм, но собрать самолёт пока для вас довольно сложно, то можно начать с квадрокоптера. В данной статье будет подробно описано, как собрать свой собственный самодельный квадрокоптер. Данная сборка будет, состоять из самых дешёвых комплектующих купленных в китайских магазинах. Конечно, данный микро квадрокоптер не будет хвастаться своими лётными качествами, и ещё какими либо параметрами. Но это вам поможет освоить правильное расположение массы на летающем аппарате и основные настройки, и основные функции квадрокоптера. Ну да ладно, хватит длинных предисловий, погнали!
И так, для данной самоделки нам понадобится:
— электродвигатели 4 шт. (2шт CW и 2 шт. CCW продаются комплектом из 4шт.)
— подходящие винты для электродвигателей 4 шт.
— аккумулятор подходящего размера 3.7V.
— кабель зарядки для аккумулятора.
— плата управления.
— аппаратура для платы управления.
— лист ABS пластика (можно использовать коробку от DVD диска).
— провода.
— терма усадка.
Из инструментов нам также понадобится:
— паяльник.
— канцелярский нож.
— дрель.
— сверла.
— линейка.
— маркер.
— двойной скотч.
— терма клей.
— супер клей.
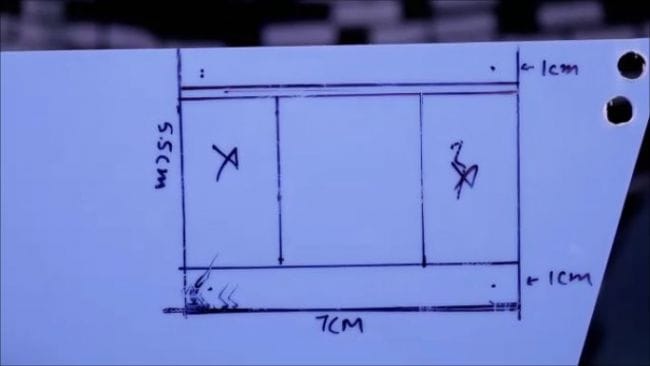
Вначале нам следует изготовить раму, на которой и будет собираться квадрокоптер. Для изготовления рамы нам следует взять лист пластика, лучше всего подойдёт ABS пластик, так как он очень легкий, что для микро квадрокоптера очень хорошо. Но если такого пластика у вас нет, то отлично подойдет коробка от DVD диска или пищевой контейнер.

Разобравшись с пластиком для рамы, на самом пластике делаем похожие метки, примерно, такие как изображены на фото ниже. Так же следует обратить внимание на отмеченные точки, в этих местах будут установлены электродвигатели, а это значит то, что они должны быть, отмечены максимально точно и симметрично.
Следующий наш шаг это высверливание отверстий под крепление электродвигателей. Это очень важный этап, так как от этого будет зависеть управляемость и общее поведение квадрокоптера. Для высверливания лучше использовать ступенчатое сверло, им будет очень удобно сделать чёткий контур. Но если у вас такого нет, то просто нужно взять сверло подходящего диаметра, то есть диаметр сверла должен совпадать с диаметром электродвигателя.


После чего нам нужно вырезать саму раму. Вырезать мы будем, используя канцелярский нож. Советую делать это с использованием линейки, приложив линейку, сильно надавливая, проводим ножом и отламываем, сгибая пластик. Старайтесь сделать максимально аккуратно.
Перейдем к установке электродвигателей. Это не совсем просто как могло показаться, так как в купленном китайском наборе иметься 2 двигателя формата CW и 2 двигателя CW. Но сначала увеличиваем длину проводов на электродвигателях, так как их длины нам просто будет не достаточно. Припаиваем отрезки проводов 3-4см и изолируем терма усадкой.


На изображение снизу показано как следует устанавливать электродвигатели. Стрелка на изображение указывает на переднюю часть квадрокоптера. И устанавливаем электродвигатели согласно изображению.
Следующий шаг это установка винтов на валы электродвигателей. Тут тоже не все так просто. Если внимательно присмотреться к винту, то на нём можно разглядеть надпись «B1» или «A2». Что означает винт с номиналом «B1» следует устанавливать на электродвигатель с номиналом CW, а винт «A2» на электродвигатель CCW.
Затем возьмём плату управления квадрокоптером и отпаяем от неё все разъёмы для электродвигателей.
Плату управления следует приклеить к раме квадрокоптера строго, так как это указанно на фото ниже. А устанавливать эту плату следует при помощи терма клея, конечно лучше будет плату прикрутить при помощи винтов, но винтики куда тяжелее, чем пара капель терма клея.
Контакты от электродвигателей припаиваем к плате управления точно так же, как это изображено на фото ниже.

Далее вырежем из того же пластика, подходящую по размеру трапецию. Таких заготовок нам понадобиться 2 шт. Они будут выполнять роль, как ножек, так и защиты квадрокоптера.

Вырезанные трапеции следует приклеить в указанные места. Клеить лучше всего на супер клей. Наносим супер клей на трапецию, ждём около одной минуты, прикладываем к раме и ждем схватывания клея.
После чего следует закрепить аккумулятор на корпусе, крепить будем при помощи двойного скотча.
Вставляем разъём от аккумулятора к плате управления, и если загорается синий светодиод, то все в норме.

После включения платы управления следует включить аппаратуру. Пошевелив стиками, аппаратура соединиться с платой управления, и синий светодиод перестанет моргать.


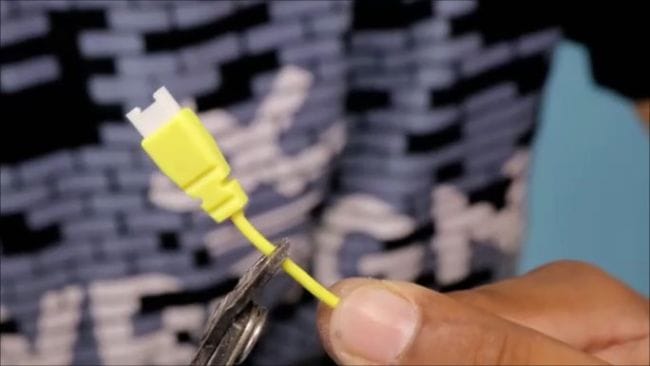
Следует задуматься о зарядке аккумулятора нашего микро квадрокоптера. Для этого возьмём уже готовый USB провод с модулем зарядки. Но так как разъёмы не подошли, автор самоделки просто перепаял разъёмы.

Все готово! Теперь остаётся настроить обороты каждого двигателя и наслаждаться полётом. Также следует добавить, что чтобы завести электродвигатели следует, свести стики к центру и двигатели начнут вращаться на минимальных оборотах. В итоге у нас получился весёлый квадрокоптер, с которым будет интересно играть, как ребенку, так и взрослому человеку, поскольку он умеет выполнять перевороты и довольно шустро летать.
Вот видео от автора с подробной сборкой и испытаниями данной самоделки:
Ну и всем спасибо за внимание и удачи в будущих проектах самодельщики.
Источник
Доставка новых самоделок на почтуПолучайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.Мастерим квадрокоптер своими руками

Желание подняться в небо, наверное, никогда не покидало человека. В этой инструкции мы сделаем шаг навстречу мечте и сделаем своими руками квадрокоптер.
Шаг 1: Строем раму
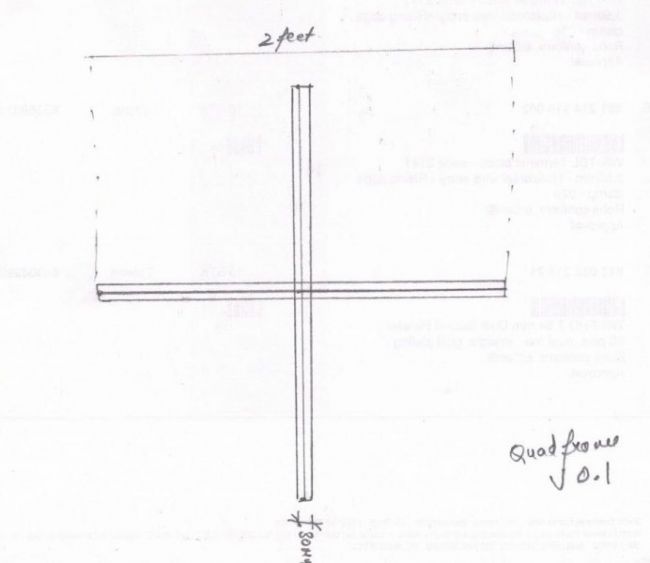
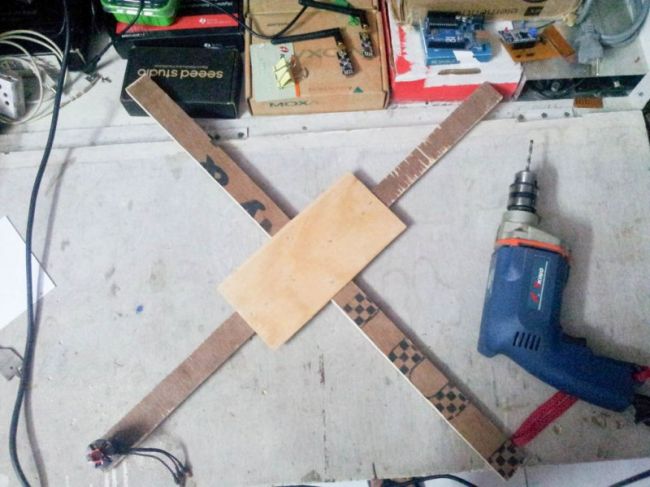
Смотрим на рисунок и по макету моделируем каркас квадрокоптера. В основе этого устройства будет находиться деревянная рама. Для её изготовления понадобятся деревянные рейки следующих размеров: 60х3х2.4см и 57х3х2.4 см, а также прямоугольная дощечка 15х6х0.2см. Далее используя клей и гвозди делаем «крестовую» конструкцию, которая и послужит каркасом.
Шаг 2. Подготавливаем мотор

На данном этапе самое время установить мотор, пропеллер и устройство по регулировке скоростей (все элементы можно приобрести в Интернете).
Для изготовления квадрокоптера из этой инструкции, использовался двигатель EMAX MT2213 935kv, винты в 24 сантиметров, EMAX 4in1 ESC.
Шаг 3. Установка двигателя
Прибегнув к штангенциркулю и карандаша, наносим разметки на основу и просверливаем ее дрелью, затем закрепляем мотор соответствующими винтами.
Шаг 4: Установка регулятора скорости

После этапа с установкой двигателя на нижнюю часть рамы устанавливаем стяжки контроллера скорости и провода, после этого — батарею питания.
Шаг 5: Крепим шасси

Для изготовления шасси можно с трубы диаметром 15 см, обрезать шириной в 2 см. кольца, в количестве 4 шт.и крепим их к каркасу скотчем. Этот шаг предназначен для плавной посадки квадрокоптера на поверхность.
Шаг 6: Монтаж контроллера квадрокоптера
Именно он стабилизирует полет устройства и является главным элементом этого процесса. Лидеры продаж:
• «ArduPilot» – основан на Arduino, отличается высокой производительностью.
• «DJI Naza» — «продвинутый» контроллер, в ценовом сегменте, подороже вышеуказанного, но с набором разных функций.
• «OpenPilot CC3D» — основан на STM32 и MPU6000 и шесть каналов. Также его можно перепрошивать.
• «NAZE32» — замысловатое устройство, с которым работают опытнфые специалисты.
• «KK2.1» – самый популярный в Интернете, оснащен AVR микроконтроллером, имеет жидкокристаллический дисплей.
• «KKMulticontroller» – основан на Atmel AVR, считается немного устаревшей моделью.
Шаг 7: Устанавливаем пульт
Вообщем, модели разнообразные от дорогостоящих — Futaba, Spektrum, до малостоящих — Turnigy и Flysky. Для изготовления этого квадрокоптера понадобится 4-х канальный пульт управления.
Шаг 8: Установка и настройка электронной «начинки»
По приведенной видео инструкции устанавливаем всю имеющуюся электронику.
Шаг 9: Время тестов
До того как запустить квадрокоптер, нужно опробовать первый полет, что и делаем.
Шаг 10 : Запуск
Ко дну каркаса крепим и подключаем батарею и устанавливаем квадрокоптер на открытую ровную поверхность. Отходим подальше и с помощью дистанционного пульта управления запускаем устройство и наслаждаемся полётом.
Вот так с помощью данной инструкции мы сделали квадрокоптер, хотя и не являемся авиаконструкторами! Не останавливайтесь на достигнутом, и удачи во всех начинаниях!
Источник
Доставка новых самоделок на почтуПолучайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.Гоночный FPV-дрон своими руками (часть 1) — сборка / Habr
Сегодня популярность гонок на дронах стремительно растёт. Любительские полетушки перерастают в серьёзные международные соревнования, а количество людей, вовлечённых в это хобби, растёт в прогрессии. Я сам недавно собрал FPV-квадрокоптер 180-го размера (расстояние в мм между осями моторов по диагонали) и спешу поделиться этим опытом.Полностью процесс сборки и настройки я описал тут и тут, а ниже будет немного изменённая версия, содержащая больше информации из моих предыдущих статей.
Я оставлю за скобками вопрос вхождения в данное хобби и перейду непосредственно к квадрокоптеру.
Выбор размера квадрокоптера
Год назад наибольшей популярностью пользовались квадрокоптеры 250-го размера. Но сейчас пилоты предпочитают собирать аппараты меньшего размера, что весьма разумно: вес меньше, а мощность та же. Я выбрал 180-й размер не из каких-то практических причин, а как некий челлендж по сборке.
На самом деле, такой подход к выбору не совсем правилен. Гораздо разумнее выбирать сначала размер пропеллеров, а уже под них — наименьшую раму, куда влезут выбранные пропеллеры. И при таком подходе 180-й формат вообще отбраковывается. Судите сами: 210-й формат позволяет ставить те же 5-дюймовые пропеллеры, что 250-й, при этом сам квадрик получается легче, а 4-дюймовые пропеллеры влезают и в 160-е рамы. Получается, что 180-й размер — это такой промежуточный формат, который «ни нашим, ни вашим». Его также можно считать утяжелённым 160-м. Но, тем не менее я выбрал именно его. Возможно потому, что это минимальный размер, способный более-менее комфортно тягать камеру GoPro или Runcam.
Комплектующие
Начнём с моторов. «Промежуточность» 180-го размера, а также богатство их ассортимента, осложняют выбор. С одной стороны, можно брать то, что идёт на 160-е, с другой — то, что устанавливают на 210-е или даже 250-е. Исходить надо из пропеллеров и батареи (количество банок). Не вижу смысла использовать батарею 3S, а по пропеллерам общие правила таковы:
- нужна максимальная статическая тяга — увеличивай диаметр пропеллера и уменьшай шаг (в разумных пределах)
- нужна высокая скорость — уменьшай диаметр и увеличивай шаг (в разумных пределах)
- нужна высокая тяга при маленьком диаметре — добавляй количество лопастей (опять же в разумных пределах, так как если разница между двух- и трёхлопастными пропеллерами ощутимая, то между трёх- и четырёхлопастными — не такая большая)
В моём случае я имею ограничение размера пропеллеров в 4 дюйма, но не имею ограничения по моторам. Значит, разумнее всего будет использовать трёхлопастные 4045 пропеллеры bullnose. Их сложно балансировать, но с ними управление отзывчевее и предсказуемее, а звук тише. С другой стороны, с двухлопастными пропеллерами скорость у квадрокоптера выше, но мне этого точно не надо. «В народе» на 180-х рамах преобладают следующие сетапы:
- лёгкий с моторами 1306-3100KV, обычными 4045 пропеллерами и батареей 850mAh
- тяжёлый и мощный под трёхлопастные bullnose пропеллеры и экшн-камеру с моторами 2205-2600KV и батареей 1300mAh
На самом же деле, рама позволяет ставить моторы от 1306-4000KV до 22XX-2700KV. Кстати, не знаю почему, но моторы 1806-2300KV сейчас в опале и мало используются.
Для своего квадрика моторы я взял — RCX h3205 2633KV. Во-первых, хотелось иметь запас по мощности (хотя с моими скромными навыками пилотирования, непонятно зачем). Во-вторых, мои сетапы никогда не получались сверхлёгкими, вдобавок я ещё и экшн-камеру таскать планирую. Конкретно моторы RCX — вариант компромиссный. Они дёшевы, но и нареканий по качеству много. На момент покупки комплектующих это были одни из немногих моторов 2205-2600KV на рынке. Сейчас (на момент написания статьи) ассортимент значительно больше и лучше выбрать что-нибудь другое.
С остальными комплектующими действовал по принципу «больше челленджа»:
- Рама RC180 V2. Недорогая (брендовые аналоги в 2-3 раза дороже), лёгкая, с хорошей компановкой и нижней пластиной 3мм. К сожалению, отдельно запчастей к ней не купить, но, учитывая цену всей рамы, вполне можно купить 1-2 комплекта на запчасти.
- Приёмник FrSky D4R-II. Поначалу хотелось попробовать FrSky X4R-SB, но в этом случае пришлось бы менять модуль на передатчике, а этого делать совсем не хотелось. Забегая вперёд скажу, что разумнее брать версию приёмника без припаянных разъёмов. У себя я всё равно их отпаял.
- Регуляторы FVT LittleBee 20A — недорогие и проверенные, но сейчас уже устаревшие. Когда я их покупал только-только появились в продаже FVT LittleBee 20A PRO на чипе Silabs F396 (та версия, что у меня использует чип Silabs F330), а на момент написания статьи уже принимались предзаказы на FVT LittleBee 20A-S, заточенные под BLHeli_S. Здесь можно почитать о технических стороне регуляторов LittleBee 20A.
- Видеопередатчик Foxeer FX799T — компактный, популярный и с микрофоном.
- Камера Sony Super HAD CCD 600TVL (IR Block, NTSC, объектив 2.8). Можно было и Foxeer XAT600M, но мне нужна без корпуса.
- Держатель камеры Diatone.
- Антенна-«клевер» BeeRotor и кабель-удлинитель.
- MICRO MinimOSD.
- В комплекте с рамой уже есть плата распределения питания, но я не хочу её использовать. Поэтому заказал Matek Mini Power Hub, она намного удобнее. Кстати, при использовании батарей 3S, эта PBD издаёт громкий свист и это никак не лечится.
- Несколько батарей Turnigy nano-tech 1300mAh 4S 45~90C.
- Подсветка с пищалкой ZG 12Bit WS2812B LED Board. Позднее выяснилось, что пищалка либо не работает, либо есть какие-то неизвестные (никакой документации не прилагалось) нюансы в подключении. В итоге поставил другую.
- Несколько комплектов пропеллеров DYS 3-blade 4040 Bullnose.
Выбор полётного контроллера
Вы наверное заметили, что в списке нет полётного контроллера. Хочу описать его выбор подробнее. В недорогие наборы для сборки часто включают контроллер CC3D, так сейчас это, пожалуй, самый дешёвый ПК. Сегодня нет совершенно никакого смысла покупать CC3D. Он устарел и не имеет таких необходимых вещей, как контроль заряда батареи и «пищалка». Его преемник CC3D Revolution — это уже совсем иной продукт с богатыми возможностями, но и ценой свыше 40€.
Современные полётные контроллеры уже перешли с процессоров F1 на F3, что сделало Naze32 ПК прошлого поколения и ощутимо снизило его цену. Сейчас это поистине народный контроллер, который имеет почти всё, что душа желает при цене от 12€.
Из ПК нового поколения наиболее популярен Seriously Pro Racing F3, причём в первую очередь, из-за наличия недорогих клонов. Сам контроллер ничем не уступает Naze32, вдобавок имеет быстрый процессор F3, большое количество памяти, три UART-порта, встроенный инвертор для S.Bus. Именно SPRacingF3 Acro я и выбрал. Остальные современные ПК не рассматривались из-за цены, либо каких-то специфических особенностей (закрытая прошивка, компоновка и т.д.)
Отдельно отмечу модную ныне тенденцию объединять несколько плат в одну. Чаще всего ПК и OSD или ПК и PDB Я не поддерживаю данную идею за парой исключений. Мне не хочется менять весь полётный контроллер из-за сгоревшей OSD. К тому же, как показывает практика, иногда такое объединение приносит проблемы.
Схема проводки
Понятное дело, что все компоненты, которым нужно питание 5В или 12В, будут получать его от BEC`ов платы распределения питания. Камеру теоретически можно было запитать напрямую от 4S-батареи, благо входное напряжение это позволяет, но ни в коем случае делать этого не стоит. Во-первых, все камеры очень восприимчивы к шумам в цепи от регуляторов, что выразится в помехах на картинке. Во-вторых, регуляторы с активным торможением (такие, как мои LittleBee), при активизации этого торможения, дают в бортовую сеть очень серьёзный импульс, что может сжечь камеру. Причём, наличие импульса напрямую зависит от износа батареи. У новых его нет, а у старых — есть. Вот познавательное видео на тему помех от регуляторов и чем их фильтровать. Так что камеру лучше питать либо от BEC`а, либо от видеопередатчика.
Также, ради улучшения качества картинки, рекомендуется пустить с камеры на OSD не только сигнальный провод, но и «землю». Если скрутить эти провода в «косичку», то «земля» действует, как экран для сигнального провода. Правда в данном случае я этого не делал.
Коли уж зашла речь о «земле», то часто спорят о том, надо ли подключать «землю» от регуляторов к ПК или достаточно одного сигнального провода. На обычном гоночном квадрокоптере однозначно надо подключать. Её отсутствие может привести к срывам синхронизации (подтверждение).
Конечная схема проводки получилась простой и лаконичной, но с парой нюансов:
- питание полётного контроллера (5В) от PDB через выходы для регуляторов
- питание радиоприёмника (5В) от ПК через разъём OI_1
- питание видеопередатчика (12В) от PDB
- питание камеры (5В) от видеопередатчика
- OSD подключил к UART2. Многие используют для этого UART1, но как и на Naze32, здесь этот разъём запараллелен с USB.
- Vbat подключен к ПК, а не к OSD. В теории показания вольтажа батареи (vbat) можно считывать как на OSD, так и на ПК, подключив батарею либо к одному, либо к другому. В чём разница? В первом случае показания будут присутствовать только на экране монитора или очков и ПК ничего не будет о них знать. Во втором случае ПК может отслеживать напряжение батареи, информировать о нём пилота (например, «пищалкой»), а также передавать эти данные на OSD, в «чёрный ящик» и по телеметрии на пульт. Настраивать точность показаний тоже проще через ПК. То есть, подключение vbat к полётному контроллеру намного предпочтительнее.
Сборка
Для начала несколько общих советов по сборке:
- Карбон проводит ток. Так что всё надо хорошо изолировать, чтобы нигде ничего не замыкало на раму.
- Всё, что выступает за пределы рамы, при аварии вероятнее всего, будет сломано или оторвано. В данном случае речь идёт, в первую очередь, о разъёмах. Провода тоже могут быть перерублены винтом, так что и их надо прятать.
- Крайне желательно после пайки покрыть все платы изолирующим лаком PLASTIK 71, причём в несколько слоёв. По собственному опыту скажу, что наносить жидкий лак кисточной намного удобнее, чем покрывать спреем.
- Не лишним будет капнуть немного термоклея на места пайки проводов к платам. Это защитит пайку от вибраций.
- Для всех резьбовых соединений желательно использовать «Локтайт» средней фиксации (синий).
Сборку я предпочитаю начинать с моторов и регуляторов. Здесь хорошее видео по сборке маленького квадрокоптера, с которого я перенял идею расположения проводов моторов.
Отдельно хочется сказать про крепление регуляторов: где и чем? Их можно закрепить на луче и под ним. Я выбрал первый вариант, так как мне кажется, что в этом положении регулятор более защищён (это мои домыслы, не подтверждённые практикой). Вдобавок, при креплении на луче, регулятор отлично охлаждается воздухом от пропеллера. Теперь о том, как закрепить регулятор. Способов много, наиболее популярный — двухсторонний скотч + одна-две стяжки. «Дёшево и сердито», к тому же демонтаж трудностей не доставит. Хуже то, что при таком креплении можно повредить плату регулятора (если ставить стяжку на неё) или провода (если крепить на них). Так что я решил крепить регуляторы термоусадочной трубкой (25мм) и запаял их вместе с лучами. Есть один нюанс: сам регулятор тоже должен быть в термоусадке (мои в ней и продавались), чтобы не соприкасаться контактами с карбоном луча, иначе — КЗ.
Также имеет смысл приклеить по кусочку двухстороннего скотча снизу на каждый луч в месте крепления мотора. Во-первых, он защитит подшипник мотора от пыли. Во-вторых, если по какой-то причине один из болтиков открутиться, он не выпадет при полёте и не потеряется.
При сборке рамы не использовал ни одного болтика из комплекта, так как все они неприлично короткие. Вместо этого приобрёл чуть длиннее и с головкой под крестовую отвёртку (есть такое личное предпочтение).
Камера не помещалась по ширине между боковых пластин рамы. Немного обработал края её платы надфилем (скорее сточил шероховатости) и она встала без проблем. Но сложности на этом не кончились. Мне очень понравилось качество держателя для камеры от Diatone, но камера с ним не помещалась в раму по высоте (примерно на 8-10мм). Сначала я приколхозил держатель на наружной (верхней) стороне пластины через неопреновый демпфер, но конструкция получилась ненадёжной. Позже пришла идея максимально простого и надёжного крепления. Я взял только хомут от Diatone`овского крепления и одел его на отрезок прута с резьбой М3. Чтобы камера не сместилась вбок, я зафиксировал хомут нейлоновыми муфтами.
Очень понравилось, что из разъёмов на ПК пришлось паять только коннекторы для регуляторов. Полноценные трёхконтактные разъёмы у меня не вписывались по высоте, пришлось пойти на хитрость и использовать двухпиновые. Для первых пяти каналов (4 для регуляторов + 1 «на всякий пожарный») я припаял коннекторы к сигнальной площадке и «земле», для остальных трёх — к «плюсу» и «земле», чтобы можно было запитать сам ПК и уже от него — подсветку. Учитывая, что китайские клоны полётных контроллеров грешат ненадёжной фиксацией разъёма USB, его я пропаял тоже. Ещё одним моментом, характерным для клона SPRacingF3, является разъём «пищалки». Как и в случае с vbat, на верхней стороне платы находится двухконтактный разъём JST-XH, а на нижней — он продублирован контактными площадками. Закавыка в том, что у клона «земля» на разъёмe постоянная и при его использовании «пищалка» всегда будет активирована. Нормальная рабочая для «пищалки» «земля» выведена только на контактную площадку. Это легко проверяется тестером: «плюс» разъёма прозванивается с «плюсом» на контактной площадке, а «минус» — не прозванивается. Следовательно, надо припаять провода для «пищалки» к нижней стороне ПК.
Трёхконтактные разъёмы регуляторов тоже пришлось заменить. Можно было использовать четыре двухконтактных штекера, но вместо этого, я взял два четырёхконтактных штекера и вставил в один «землю» всех регуляторов, во второй (соблюдая порядок подключения моторов) — сигнальный провод.
Пластина с подсветкой по ширине больше, чем рама и выступает по бокам. Единственное место, где её не собьют пропеллеры — под рамой. Пришлось колхозить: взял длинные болты, надел на них нейлоновые муфты с предварительно проделанными прорезями (чтоб стяжки, крепящие подсветку, могли зафиксироваться) и вкрутил через нижнюю пластину в стойки рамы. К получившимся ножкам стяжками притянул пластину со светодиодами (отверстия в пластине подходили идеально) и залил стяжки термоклеем. С задней стороны пластины припаял коннекторы.
Уже после сборки, на этапе настройки выяснилось, что с пищалкой что-то не то. Сразу после подключения батареи она начинала монотонно пищать, а если активизировать её с пульта, то на этот монотонный писк накладывался ещё и ритмичный. Я сначала грешил на ПК, но после замера напряжение мультиметром, стало ясно где именно проблема. На самом деле можно было с самого начала подключить к проводам пищалки обычный светодиод. В итоге я заказал сразу несколько пищалок, послушал их и установил самую громкую.
Часто PDB и контроллер крепят к раме нейлоновыми болтами, но я не доверяю их прочности. Поэтому я использовал 20мм металлические болты и нейлоновые муфты. После установки PDB я припаял питание регуляторов (остальные провода были припаяны заранее) и залил места пайки термоклеем. Главный силовой провод, идущий к батарее, я стяжкой закрепил к раме, чтобы его не вырвало в случае аварии.
С приёмника я кусачками удалил все коннекторы, кроме необходимых трёх, а перемычку между третьим и четвёртым каналами пропаял прямо на плате. Как я уже писал выше, разумнее было бы брать приёмник без коннекторов. Также я развернул у него антенны и заплавил в термоусадку. На раме приёмник хорошо поместился между PBD и задней стойкой. При таком расположении хорошо видно его индикаторы и есть доступ к кнопке бинда.
Видеопередатчик стяжками и термоклеем я закрепил к верхней пластине рамы так, чтобы через прорезь был доступ к кнопке переключения каналов и светодиодным индикаторам.
Для крепления антенны видеопередатчика в раме есть специальное отверстие. Но не стоит соединять её с передатчиком напрямую. Получается своего рода рычаг, где одним плечом служит антенна, другим — сам передатчик со всеми проводами, а место крепления разъёма будет точкой опоры, на которую придётся максимум нагрузки. Таким образом, в случае аварии почти со 100% вероятностью разъём на плате передатчика отломается. Поэтому крепить антенну надо через какой-то переходник или удлинитель.
К MinimOSD я решил припаять разъёмы, а не провода напрямую. На форумах пишут, что эта плата нередко сгорает, следовательно разумно сразу подготовиться к возможной замене. Я взял планку с коннекторами в два ряда, нижние припаял к контактным площадкам с отверстиями, а на верхние вывел vIn и vOut. После этого залил места пайки термоклеем и упаковал всю плату в термоусадку.
Последним штрихом является наклейка с номером телефона. Она даст хоть небольшую надежду в случае потери квадрокоптера.
Сборка на этом подошла к концу. Получилось компактно и при этом сохранён доступ ко всем необходимым органам управления. Больше фотографий можно посмотреть здесь. Масса квадрокопрера без батареи составляет 330г, с батареей — 470г. И это ещё без экшн-камеры и крепления для неё. В следующей статье я расскажу о прошивке и настройке получившегося квадрокоптера.
Квадрокоптер своими руками


Сделать своими руками квадрокоптер, не так уж и сложно и не сильно затратно. В этой статье мастер-самодельщик покажет нам, как это сделать.
Инструменты и материалы:
-Плата приемника H8 Mini;
-Пульт управления;
-Комплект двигателей с винтами;
-Батарея;
-Фанера;
-Карандаш;
-Линейка;
-Наждачная бумага;
-Лобзик;
-Паяльные принадлежности;
-Клеевой пистолет;
-Скотч;
Шаг первый: рама
На фанере чертит квадрат 6*6 сантиметров. Вписывает в квадрат круг. Прочерчивает дуги крестовины. Выпиливает раму. Шлифует.
Шаг второй: плата и двигатели
Соединяет проводами клеммы двигателей с контактами платы.
Приклеивает плату и двигатели к раме.
Фиксирует двигатели скотчем.
Шаг третий: батарея
Приклеивает и подсоединяет батарею.
Проверяет работу двигателей.


Теперь осталось установить ножки.
Квадрокоптер готов, можно проводить испытания.



Видео с процессом изготовления квадрокоптера.
Источник
Доставка новых самоделок на почтуПолучайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.Квадрокоптер своими руками

Первый квадрокоптер, как известно, появился в 2006 году. Собрали дрон германские разработчики Бускер и Бусс, причем сделали это сами. И началось: многие инженеры по всему миру загорелись идеей создания собственных моделей квадрокоптера. Есть такие умельцы и сегодня. Хотите собрать свой квадрокоптер и вы. А иначе стали бы читать сейчас этот материал?
Рекомендуем почитать: из чего состоит квадрокоптер
С чего же начать чтоб сделать квадрокоптер своими руками?
1. Рама. Ее можно сделать без особого труда из пластиковых труб небольшого диаметра, используемых в прокладывании канализационных и иных коммуникаций. Можно изготовить раму из куска фанеры. Понадобится квадрат 110 на 110 мм. Кроме того, потребуется алюминиевый профиль (квадратный). Лучи (длиной по 495 мм) прикрепляются винтами по обеим диагоналям получившегося квадрата. Возможна покупка готовой рамы (рис. снизу).\


Из алюминия невысокого профиля можно сделать посадочные «лыжи» коптера. Из него же можно соорудить держатель для аккумулятора.
2. Далее потребуются аппаратура, допустим Turnigy 9XR, управляющая плата и аккумулятор для аппаратуры. Плюсом к тому необходимо приобрести силовой Li — Po аккумулятор (для самого квадрокоптера), пропеллеры, устройство для подзарядки аккумуляторов.

3. Первым делом устанавливается управляющая плата – в центральную часть платформы из получившегося куска фанеры или карбона. Делается это в пазы, непосредственно просверленные в алюминиевой основе через фанеру.

4. Рядом с платой устанавливается приемник (можете сделать это при помощи суперклея). Далее сверлятся отверстия для крепления двигателя. При этом нужно учитывать, чтобы расстояние от края до оси во всех четырех случаях было равным.

5. Затем необходимо сделать «паука» из проводов – от регуляторов скорости. Проводку требуется соединить параллельно с помощью соответствующих переходников. Разъемы при этом можно использовать в том месте, в котором подключается аккумулятор к «пауку».

6. Все требуется спаять, сделать термоусадку, подключить провода (сигнальные). Для начинающих это будет большой проблемой.

7. Можно тестировать получившийся квадрокоптер.
Умельцы, которым уже доводилось успешно собирать квадрокоптеры, советуют не экономить на комплектующих. Особенно важным это замечание является сейчас, когда на рынке представлено немало различных микроприборов, в том числе контроллеров и датчиков. Каждый может использоваться при собственноручном производстве дрона, но не каждый может оправдать ожидания разработчика.
Самый простой вариант – приобрести готовую плату с уже установленными датчиками (гироскопом, акселерометром, барометром, магнитометром).
Для чего они нужны?
Гироскоп необходим для контроля углового ускорения, акселерометр замеряет гравитацию, барометр отвечает за набранную высоту, а магнитометр – за направление движения. Сегодня на рынке представлены платы, в которых есть также и GPS-принимающие.
Советы
Перед сборкой квадрокоптера своими руками советуем ознакомиться с советами профессионалов (тех, кто не раз делал дроны сам), ведь для начинающих это будет не так уж и просто:
- Первый «дрон» не должен быть с камерой для фото- или видеосъемки, он – ваша первая работа, задача которой – взлететь, уверенно держаться в создухе и не сломаться при первом же полете;
- Не гонитесь за масштабами. Лучше построить менее крупный и громоздкий, но рабочий квадрокоптер;
- Старайтесь использовать минимум соединений и дополнительных элементов. Множество датчиков и контроллеров оправдано далеко не во всех случаях,
- Если вы все же решились сделать квадрокоптер своими руками с камерой, то знайте, что для высокого качества картинки потребуется основание более крупных размеров. «Усадить» её на устройство намного сложнее, да и в целом конструкция с ним становится менее устойчивой и крепкой.
Если у вас нет времени на сборку или просто терпения, советуем почитать как сэкономить и где выгоднее купить квадрокоптер.
Будем благодарны Вам, если поделитесь с друзьями:

Всех приветствую на своем сайте. Мое хобби — дроны. Здесь я описываю модели, их характеристики, делюсь новостями, выкладываю инструкции. Вступай в наше сообщество любителей дронов!